Cactus 4.18
Users’ Guide
commit 7081ec6a0b60a9fe9abdf72b1916e9d843d4b2b4
Documentation compiled on: May 16, 2026
Cactus 4.18
Users’ Guide
commit 7081ec6a0b60a9fe9abdf72b1916e9d843d4b2b4
Documentation compiled on: May 16, 2026
This document contains a quick-start guide to installing and running a Cactus application. In subsequent chapters, it provides more detailed information on advanced user’s topics, as well as an introduction to thorn writing. Please report omissions, errors, or suggestions to any of our contact addresses below.
Overview of documentation
A guide through the process of obtaining and installing Cactus and running a simple example application with it.
A more in-depth description of required hardware and software, along with configuration, installation and running options. Describes how to check the installation with Cactus test suites.
An introduction to thorn concepts and description of how to create, write and maintain application thorns. Explanation of use of the programming interface to take advantage of parallelism and modularity. This is followed by a more advanced discussion of user supplied infrastructure routines such as additional output routines, drivers, etc.
These contain a glossary, a description of the Cactus Configuration Language, the Utility routines and other odds and ends, such as how to use GNATS and TAGS.
Related topics are discussed in separate documents including:
Contains detailed descriptions of the functions provided by the Cactus flesh API, along with other reference material.
Typographical Conventions
Is currently used for everything you type, for program names, and code extracts.
Indicates a compulsory argument.
Indicates an optional argument.
Indicates an exclusive or.
How to Contact Us
Please let us know of any errors or omissions in this guide, as well as suggestions for future editions. These can be reported via email to cactusmaint@cactuscode.org.
Acknowledgements
Hearty thanks to all those who have helped with documentation for the Cactus Code. Special thanks to those who struggled with the earliest sparse versions of this guide and sent in mistakes and suggestions, in particular John Baker, Carsten Gundlach, Ginny Hudak-David, Sai Iyer, Paul Lamping, Nancy Tran and Ed Seidel.
Cactus is distributed, extended, and maintained using the free git software (https://git-scm.com/) git allows many people to work on a large software project together without getting into a tangle. Since Cactus thorns are distributed from several repositories on the main git site, and from a growing number of user sites, we provide a GetComponents script on our website for checking out the flesh and thorns. The script is available at
https://github.com/gridaphobe/CRL/raw/master/GetComponents.
The script takes as an argument the name of a file containing a ThornList, that is a list of thorns with the syntax
Optional directives in the ThornList indicate which repository to fetch thorns from. The ThornList is written in the Component Retrieval Language, documented at https://github.com/gridaphobe/CRL/wiki/Component-Retrieval-Language.
The same script can be used to checkout additional thorns, or to update existing ones.
The components that make up Cactus can also be checked out directly using git from https://bitbucket.org/cactuscode/.
Another script, MakeThornList, can be used to produce a minimal ThornList from a given Cactus par file. It needs a master ThornList to be copied into your Cactus directory.
See http://www.cactuscode.org/download/thorns/MakeThornList.
A fresh checkout creates a directory Cactus with the following subdirectories:
created by GetComponents to hold the checked out repositories
Cactus documentation
contains libraries
contains the source code for Cactus
contains the Cactus arrangements. The arrangements (the actual “physics”) are not supplied by just checking out just Cactus. If the arrangements you want to use are standard Cactus arrangements, or reside on our git repository (https://bitbucket.org/cactuscode/), they can be checked out in similar way to the flesh.
When Cactus is first compiled, it creates a new directory Cactus/configs, which will contain all the source code, object files and libraries created during the build process.
Configurations are described in detail in Section A1.2.1.
Cactus can be built in different configurations from the same copy of the source files, and these different configurations coexist in the Cactus/configs directory. Here are several instances in which this can be useful:
Different configurations can be for different architectures. You can keep executables for multiple architectures based on a single copy of source code, shared on a common file system.
You can compare different compiler options, and debug-modes. You might want to compile different communication protocols (e.g. MPI or Globus), or leave them out all together.
You can have different configurations for different thorn collections compiled into your executable.
At its simplest, this is done by gmake <config>. This generates a configuration with the name config, doing its best to automatically determine the default compilers and compilation flags suitable for the current architecture.
There are a number of additional command-line arguments which may be supplied to override some parts of the procedure; they are listed in Section B2.1.
Once you have created a new configuration, the command
gmake <configuration name>
will build an executable, prompting you along the way for the thorns which should be included. There is a range
of gmake targets and options which are detailed in Section B2.4.1.
Cactus executables always run from a parameter file (which may be provided as a command-line argument taken from standard input), which specifies which thorns to use and sets the values of each thorn’s parameters (the parameters that are not set will take on default values, see D2.3).
There is no restriction on the name of the parameter file, although it is conventional to use the file extension .par. Optional command-line arguments can be used to customise runtime behaviour, and to provide information about the thorns used in the executable. The general syntax for running Cactus from a parameter file is then
./cactus_<config> <parameter file> [command-line options]
A parameter file is a text file whose lines are either comments or parameter statements. Comments are blank lines or lines that begin with ‘#’. A parameter statement consists of one or more parameter names, followed by an ‘=’, followed by the value(s) for this (these) parameter(s). Note that all string parameters are case insensitive.
The first parameter statement in any parameter file should set ActiveThorns, which is a special parameter that tells the program which thorns are to be activated. Only parameters from active thorns can be set (and only those routines scheduled by active thorns are run). By default all thorns are inactive. For example, the first entry in a parameter file which is using just the two thorns CactusPUGH/PUGH and CactusBase/CartGrid3D should be
ActiveThorns = "PUGH CartGrid3D"
Parameter specifications following ActiveThorns usually are carried out by listing the name of the thorn which defined the parameter, two colons, and the name of the parameter — e.g. wavetoyF77::amplitude (see Section C1.4.2 for more information).
Notes:
You can obtain lists of the parameters associated with each thorn using the command-line options -o and -O (Section B3.1).
For examples of parameter files, look in the par directory which can be found in most thorns.
The Cactus make system provides a mechanism for generating a Thorn Guide containing separate chapters for each thorn and arrangement in your configuration. Details about parameters, grid variables and scheduling are automatically included in from a thorn’s CCL files into the Thorn Guide. To construct a Thorn Guide for the configuration \(<\)config\(>\) use
gmake \(<\)config\(>\)-ThornGuide .
As your Cactus executable runs, standard output and standard error are usually written to the screen. Standard output provides you with information about the run, and standard error reports warnings and errors from the flesh and thorns.
As the program runs, the normal output provides the following information:
A report is made as each of the thorns in the ActiveThorns parameters from the parameter file (see Section B3.2) is attempted to be activated. This report shows whether the thorn activation was successful, and if successful gives the thorn’s implementation. For example
Activating thorn idscalarwave...Success -> active implementation idscalarwave
If any of the parameters in the parameter file does not belong to any of the active thorns, or if the parameter value is not in the allowed range (see Section C1.4.1), an error is registered. For example, if the parameter is not recognised
Unknown parameter time::ddtfac
or if the parameter value is not in the allowed range
Unable to set keyword CartGrid3D::type - ByMouth not in any active range
The scheduled routines (see Section C1.5), are listed, in the order that they will be executed. For example
----------------------------------------------------------------------
Startup routines
Cactus: Register banner for Cactus
CartGrid3D: Register GH Extension for GridSymmetry
CartGrid3D: Register coordinates for the Cartesian grid
IOASCII: Startup routine
IOBasic: Startup routine
IOUtil: IOUtil startup routine
PUGH: Startup routine
WaveToyC: Register banner
Parameter checking routines
CartGrid3D: Check coordinates for CartGrid3D
IDScalarWave: Check parameters
Initialisation
CartGrid3D: Set up spatial 3D Cartesian coordinates on the GH
PUGH: Report on PUGH set up
Time: Set timestep based on speed one Courant condition
WaveToyC: Schedule symmetries
IDScalarWave: Initial data for 3D wave equation
do loop over timesteps
WaveToyC: Evolution of 3D wave equation
t = t+dt
if (analysis)
endif
enddo
----------------------------------------------------------------------
Usually a thorn registers a short piece of text as a banner. This banner of each thorn is displayed in the standard output when the thorn is initialised.
Output methods in Cactus are all provided by thorns. Any number of output methods can be used for each run. The behaviour of the output thorns in the standard arrangements are described in those thorns’ documentation.
In general, output thorns decide what to output by parsing a string parameter containing the names of those grid variables, or groups of variables, for which output is required. The names should be fully qualified with the implementation and group or variable names.
There is usually a parameter for each method to denote how often, in evolution iterations, this output should be performed. There is also usually a parameter to define the directory in which the output should be placed, defaulting to the directory from which the executable is run.
See Chapter C2.7 for details on creating your own IO method.
Checkpointing is defined as saving the current state of a run (parameter settings, contents of grid variables, and other relevant information) to a file. At a later time, this run can then be restarted from that state by recovering all the data from the checkpoint file.
Cactus checkpointing and recovery methods are provided by thorns. In general, these thorns decide how often to generate a checkpoint. They also register their recovery routines with the flesh; these recovery routines may then be called during initialisation of a subsequent run to perform the recovery of the state of the run. Such a recovery is requested by setting a parameter in the parameter file.
See Chapter C2.8 for details of how to create your own checkpointing and recovery methods.
For tracking problem reports and bugs, we use the Bitbucket issue tracker at https://bitbucket.org/einsteintoolkit/tickets/ which allows easy submission and browsing of problem tickets.
A description of the issue categories we use is provided in Appendix D6.
In general, Cactus requires the following set of software to function in single processor mode. Please refer to the architecture section B1.2 for architecture specific items.
Perl is used extensively during the Cactus thorn configuration phase. Perl is available for nearly all operating systems known to man, and can be obtained at http://www.perl.org.
The make process works with the GNU make utility (referred to as gmake henceforth). While other make utilities may also work, this is not guaranteed. Gmake can be obtained from your favorite GNU site, or from http://www.gnu.org.
C compiler. Cactus requires it to support the C99 standard. For example, the GNU compiler. This is available for most supported platforms. Platform specific compilers should also work.
C Preprocessor. For example, the GNU cpp. These are normally provided on most platforms, and many C compilers have an option to just run as a preprocessor.
C++ compiler. Cactus requires it to support the C++11 standard. For example, the GNU compiler. This is available for most supported platforms. Platform specific compilers should also work.
git is not needed to run/compile Cactus, but you are strongly encouraged to install this software to take advantage of the update procedures. It can be downloaded from https://git-scm.com/.
To use Cactus, with the default driver1 (CactusPUGH/PUGH) on multiple processors you also need to include the thorn ExternalLibraries/MPI in your thornlist, to include support for
The Message Passing Interface, which provides inter-processor communication. Supercomputing sites often supply a native MPI implementation that is very likely to be compatible with Cactus. Otherwise, there are various freely available ones available, e.g. the OpenMPI version of MPI is available for various architectures and operating systems at http://www.open-mpi.org/.
If you are using any thorns containing routines written in CUDA (Compute Unified Device Architecture), a parallel computing architecture developed by NVIDIA, you also need
a CUDA compiler. For example, the NVIDIA C compiler. In many cases, you can compile your C and C++ code with a CUDA compiler without encountering any problems, but you are advised to use a CUDA compiler exclusively for CUDA code.
If you are using any thorns containing routines written in Fortran you also need
a Fortran compiler.
While not required for compiling or running Cactus, for thorn development it is useful to install
These programs enable you browse through the calling structure of a program by help of a function call database. Navigating the flesh and arrangements becomes very easy. Emacs and vi both support this method. See D7 for a short guide to tags.
Cactus runs on many machines, under a large number of operating systems, on a large number of CPU architectures. Here, we list the machines we have recently (in the past few years) compiled and verified Cactus on, including some architecture specific notes.
If your system is not on the list, the it is very likely that Cactus will work anyway. As a rule of thumb, if the GCC compiler is available, Cactus will run.
Operating systems:
(this includes Blue Gene and Cray systems)
CPU architectures:
(aka Blue Gene/Q)
(Power 5, 6, 7)
(aka Xeon Phi)
(aka IA32)
(aka AMD64)
Systems that are of historic interest only:
32 or 64 bit running Irix.
Compaq operating system and Linux. Single processor mode and MPI supported. The Alphas need to have the GNU C/C++ compilers installed.
running Linux.
(MacOS X and Linux PPC)
32 or 64 bit running AIX.
(only partially supported)
Disk space may be a problem on supercomputers where home directories are small. A workaround is to first create a configs directory on scratch space, say scratch/cactus_configs/ (where scratch/ is your scratch directory), and then either
set the environment variable CACTUS_CONFIGS_DIR to point to this directory
or
soft link this directory (ln -s scratch/cactus_configs Cactus/configs/) to the Cactus directory, if your filesystem supports soft links.
There are four ways to pass options to the configuration process.
Pass options individually in shell environment variables:
export <option name>=<chosen value> # for bash
setenv <option name> <chosen value> # for (t)csh
gmake <configuration name>-config
Either: create a default configuration file ${HOME}/.cactus/config.
All available configuration options may be set in a default options file ${HOME}/.cactus/config, any option which are not set will take a default value. The file should contain lines of the form:
<option> [=] ...
The equals sign is optional. Spaces are allowed everywhere. Text starting wit a ’#’ character will be ignored as a comment.
Or: list your Cactus configuration files in an environment variable CACTUS_CONFIG_FILES:
gmake <config name>-config CACTUS_CONFIG_FILES=\(<\)list of config files\(>\)
Multiple configuration files, with their file names separated by a ’:’ character, will be processed in order. Each file should be given by its full path. The options file has the same format as ${HOME}/.cactus/config.
Add the options to a configuration file and use,
gmake <config name>-config options=<filename>
The options file has the same format as ${HOME}/.cactus/config. (Note that these options are added to those from the ${HOME}/.cactus/config file.)
Pass the options individually on the command line,
gmake <config name>-config <option name>=<chosen value>, ...
Not all configuration options can be set on the command line. Those that can be set are indicated in the table below.
The options are listed here in order of increasing precedence, e.g. options set on the command line will take priority over (potentially conflicting) options set in ${HOME}/.cactus/config or other Cactus configuration files. Default options from ${HOME}/.cactus/config will only be read if the environment variable CACTUS_CONFIG_FILES is not set.
Options read from configuration files can use expressions of the form ${VARIABLE} which are replaced
by the value of the environment variable $VARIABLE at the time gmake <config name>-config
runs. The $ sign can be escaped by duplicating it $$, and $ followed by any character other than $
or { is left as is (this may change in the future as more expansions are added). Since gmake also
interprets $$ in order to have a $ show up to the shell it must be quadrupled $$$$. For example
setting
CC = $${CXX} $(CXXFLAGS) $$(CPPFLAGS) -license ${HOME}/.license -I$$$${HDF5_HOME}/include
expands ${CXX}, $(CXXFLAGS), and $(CPPFLAGS) in the Makefile, ${HOME} when <config name>-config runs,
and ${HDF5_HOME} when the compiler ${CXX} runs.
It is important to note that these methods cannot be used to, for example, add options to the default values for CFLAGS. Setting any variable in the configuration file or the command line will overwrite completely the default values.
There is a plethora of available options.
Cross compiling
If you are compiling on an architecture other than the one you are producing an executable for, you will need to pass the
option, where x-x-x is the canonical name of the architecture you are compiling for, such as sx6-nec-superux; the format is processor-vendor-OS.
Compiled thorns
These specify the chosen set of thorns for compilation. If the thorn choice is not provided during configuration, a list containing all thorns in the arrangements directory is automatically created, and the user is prompted for any changes.
Name of file containing a list of thorns with the syntax <arrangement
name>/<thorn name>. Lines beginning with # or ! are ignored.
Location of directory containing THORNLIST. This defaults to the current working directory.
Compiler and tool specification
The C compiler.
The C++ compiler.
The CUDA compiler.
The Fortran compiler.
Ignored
The preprocessor used to generate dependencies for and to preprocess C and C++ code.
The preprocessor used to generate dependencies for and to preprocess Fortran code.
The linker.
The archiver used for generating libraries.
The archive indexer to use.
The program to use to create a directory.
The name of the Perl executable.
Output Directory
By default, Cactus generates intermediate and object files underneath a directory named “configs” inside the Cactus directory. This location may be changed through the use of the CACTUS_CONFIGS_DIR environment variable. See the section on File Layout B2.3.
Compilation and tool flags
Flags which are passed to the compilers and the tools.
Flags for the C compiler.
Flags for the CUDA compiler.
Flags for the C++ compiler.
Flags for the Fortran compiler.
Ignored
Flags for the preprocessor (used to generate compilation dependencies for and preprocess C and C++ code).
Flags for the preprocessor (used to generate compilation dependencies for and preprocess Fortran code).
Flags for MKDIR, so that no error is given if the directory exists.
Flags for the linker. Warning: This variable is ignored while the compilers and linkers are autodetected. This can lead to strange errors while configuring. You can pass the linker flags in the variable LD instead.
Optional set of flags for the linker that change the behaviour how archives are handled. These flags are used just before and just after listing the flesh and all thorn libraries. This mechanism can be used to force linking in all object files from the flesh and all thorns, which can help detect duplicate definitions. Otherwise, duplicate routines may go undetected.
Flags for the archiver.
Whether error messages and debug information in the compiled C and C++
files should point to the original source file or to an internal file created by
Cactus. The only options available are yes and no, the default is yes. Set this
to no if your compiler reports error messages about unrecognised # directives.
Whether error messages and debug information in the compiled Fortran files
should point to the original source file or to an internal file created by Cactus.
The only options available are yes and no, the default is yes. Set this to no
if your compiler reports error messages about unrecognised # directives.
Enables cross compilation. Available options are yes and no, the default is no. To create a cross-compiled configuration one must explicitly set this option to yes. You will also have to set ENDIAN.
Explicitly sets the endianess of multi-byte types. Normally this is detected automatically but needs to be specified for cross-compilations. Available options are little and big.
Disable support for the data type CCTK_INT16. The only options available are yes and no, the default is no. Cactus autodetects this data type only for C. If the C compiler supports it, but the Fortran compiler does not, it may be necessary to disable CCTK_INT16 altogether, since Cactus assumes that data types are fully supported if they exist.
Disable support for the data type CCTK_REAL16. The only options available are yes and no, the default is no. Cactus autodetects this data type only for C. If the C compiler supports it, but the Fortran compiler does not, it may be necessary to disable CCTK_REAL16 altogether, since Cactus assumes that data types are fully supported if they exist.
Specifies what type of debug mode should be used, the default is no debugging. Current options are yes, no, or memory. The option yes switches on all debugging features, whereas memory just employs memory tracing (Section C1.9.3).
Debug flags for the C compiler, their use depends on the type of debugging being used.
Debug flags for the CUDA compiler, their use depends on the type of debugging being used.
Debug flags for the C++ compiler, their use depends on the type of debugging being used.
Debug flags for the Fortran 90 compiler, their use depends on the type of debugging being used.
Ignored.
Debug flags for the linker, their use depends on the type of debugging being
used. Default to CXX_DEBUG_FLAGS if LD is not set.
Specifies what type of optimisation should be used. The only options currently
available are yes and no. The default is to use optimisation.
Note that the British spelling OPTIMISE will be checked first and, if set, will
override any setting of the American-spelled OPTIMIZE.
Optimisation flags for the C compiler, their use depends on the type of optimisation being used.
Optimisation flags for the C compiler, their use depends on the type of optimisation being used.
Optimisation flags for the C++ compiler, their use depends on the type of optimisation being used.
Optimisation flags for the Fortran 90 compiler, their use depends on the type of optimisation being used.
Ignored.
Optimisation flags for the linker, their use depends on the type of optimisation
being used. Default to CXX_OPTIMISE_FLAGS if LD is not set.
Optimisation flags used to indicate that no optimisation should be performed. These are invoked when OPTIMISE=no is used.
Optimisation flags used to indicate that no optimisation should be performed. These are invoked when OPTIMISE=no is used.
Optimisation flags used to indicate that no optimisation should be performed. These are invoked when OPTIMISE=no is used.
Optimisation flags used to indicate that no optimisation should be performed. These are invoked when OPTIMISE=no is used.
Ignored.
Optimisation flags used to indicate that no optimisation should be
performed. These are invoked when OPTIMISE=no is used. Default to
CXX_NO_OPTIMISE_FLAGS if LD is not set.
Specifies if OpenMP multi-threading should be used. The only options currently available are yes and no. The default is to use no OpenMP.
OpenMP flags for the C compiler, their use depends on the type of OpenMP stack being used.
OpenMP flags for the CUDA compiler, their use depends on the type of OpenMP stack being used.
OpenMP flags for the C++ compiler, their use depends on the type of OpenMP stack being used.
OpenMP flags for the Fortran 90 compiler, their use depends on the type of OpenMP stack being used.
Ignored.
OpenMP flags for the linker, their use depends on the type of OpenMP stack
being used. Default to CXX_OPENMP_FLAGS if LD is not set.
Specifies what type of profiling should be used. The only options currently available are yes and no. The default is to use no profiling.
Profile flags for the C compiler, their use depends on the type of profiling being used.
Profile flags for the CUDA compiler, their use depends on the type of profiling being used.
Profile flags for the C++ compiler, their use depends on the type of profiling being used.
Profile flags for the Fortran 90 compiler, their use depends on the type of profiling being used.
Ignored.
Profile flags for the linker, their use depends on the type of profiling being
used. Default to CXX_PROFILE_FLAGS if LD is not set.
Specifies what type of build warnings should be used. The only options currently available are yes and no. The default is to produce no warnings.
Warning flags for the C compiler, their use depends on the type of warnings used during compilation (Section B2.4.4).
Warning flags for the CUCC compiler, their use depends on the type of warnings used during compilation (Section B2.4.4).
Warning flags for the C++ compiler, their use depends on the type of warnings used during compilation (Section B2.4.4).
Warning flags for the Fortran 90 compiler, their use depends on the type of warnings used during compilation (Section B2.4.4).
Ignored.
Warning flags for the linker, their use depends on the type of warnings used
during linking (Section B2.4.4). Default to CXX_WARN_FLAGS if LD is not set.
Architecture-specific flags
For Irix SGI systems: whether to build a 32- or 64-bit configuration.
For IBM SP systems: whether to build a 32- or 64-bit configuration.
Library flags
Used to specify auxiliary libraries and directories to find them in.
Additional libraries. This variable can also contain linker options, e.g. to
switch between static and dynamic linking. (Cactus adds a -l prefix to library
names, but does not modify linker options.) Warning: This variable is ignored
while the compilers and linkers are autodetected. This can lead to strange
errors while configuring. You can pass the additional libraries in the variable
LD instead.
Any other library directories. This variable can also contain linker options.
(Cactus adds an -L prefix to library directories, but does not modify linker
options.)
Extra include directories
Used to specify any additional directories for system include files.
Precision options
Used to specify the precision of the default real and integer data types, by the number of bytes the data takes up. Note that not all values will be valid on all architectures.
Allowed values are 16, 8, 4.
Allowed values are 8, 4, 2.
Executable name
The directory in which to place the executable.
The name of the executable.
Extra packages
Compiling with extra packages is described fully in Section B2.2, which should be consulted for the full range of configuration options.
Miscellaneous
Setting this to no turns off all prompts from the make system.
Setting this to yes instructs gmake to print the commands that it is executing.
Setting this to no is an depreciated way of using VERBOSE = yes.
Extra packages are provided through the ExternalLibraries thorns each of which usually supports a set of variables THORN_DIR, THORN_LIBS, THORN_LIB_DIRS, and THORN_INC_DIRS to control where include and library files are located, where THORN is the name of the ExternalLibrary. The actual list of supported variables can be found in each thorn’s configuration.ccl file.
While not all ExternalLibraries interpret all options in the same way, typically options have the following meaning and allowed values:
THORN_DIR can take the values:
compile included THORN copy.
search for THORN in THORN_DIR.
do not search for or build THORN, instead use information provided in THORN_LIBS, THORN_LIB_DIRS, and THORN_INC_DIRS.
use native THORN implementation provided by the compiler or operating system; no further options are used.
search for THORN in the given directory.
if THORN_DIR is missing THORN is searched for in a number of well known locations and built from the included copy if it is not found.
The location of include files, modules and Fortran module files is given via:
where to search for THORN.
libraries.
library directories.
include file directories.
where to install THORN if the built in copy is used.
Each thorn which is compiled as one external library will automatically use the library version contained in the <library>/dist folder. In particular, the tarball in <library>/dist is only used if either THORN_DIR is set to BUILD or is left empty and no precompiled copy of the library is found. If another location is specified via the THORN_DIR variable in the configuration file at compilation, then the lib/sbin/strip-incdirs.sh script will automatically strip away (for safety reasons) the locations:
from THORN_INC_DIRS which default to THORN_DIR/include. Therefore, if there is any need for using one already installed version of one external library, the aforementioned location should be avoided (e.g. indicating /home as the THORN_DIR will work with no problems if the required library is installed there) or should be carefully checked, in order to avoid unwanted stripping. It is worth mentioning that the compiler normally automatically searches in /usr and /usr/local so stripping does not prevent it from being found (basically they are only found later in the search order of the compiler). The same stripping happens to THORN_LIB_DIRS in lib/sbin/strip-libdirs.sh with a larger list of directories:
The configuration process sets up various subdirectories and files in the configuration directory (this is either a directory configs inside the main Cactus directory, or the directory pointed to by the CACTUS_CONFIGS_DIR environment variable). to contain the configuration specific files; these are placed in a directory with the name of the configuration.
contains the files created by the configure script:
The most important ones are
contains compilers and compilation flags for a configuration.
contains details about extra packages used in the configuration.
The main configuration header file, containing architecture specific definitions.
An architecture specific header file containing things which cannot be automatically detected, and have thus been hand-coded for this architecture.
These are the first files which should be checked or modified to suit any peculiarities of this configuration.
In addition, the following files may be informative:
A Perl script used to determine how the Fortran compiler names subroutines. This is used to make some C routines callable from Fortran, and Fortran routines callable from C.
Initially empty. It can be edited to add extra architecture specific dependencies needed to generate the executable.
The make rules for generating object files from source files.
Finally, autoconf generates the following files.
A log of the autoconf process.
A script which may be used to regenerate the configuration.
An internal file used by autoconf.
An empty directory which will contain the libraries created for each thorn.
An empty directory which will contain the object files generated for this configuration, and preprocessed source files.
A file containing information about the configuration (including the options used to configure the configuration).
A directory which contains all the files generated by the CST from the .ccl files.
A scratch directory which is used to accommodate Fortran 90 modules.
Once you have created a new configuration, the command
gmake <configuration name>
will build an executable, prompting you along the way for the thorns which should be included. There is a range
of gmake targets and options which are detailed in the following sections.
A target for gmake can be naively thought of as an argument that tells it which of several things listed in the Makefile it is to do. The command gmake help lists all gmake targets:
builds a configuration. If the configuration doesn’t exist, it will create it.
compiles only the thorns listed.
removes all object and dependency files from a configuration.
removes all dependency files from a configuration.
removes all object files from a configuration.
creates a new configuration or reconfigures an existing one overwriting any previous
configuration options.
The configuration options are stored in a file configs/<config>/config-info.
displays the options of the configuration (cat configs/<config>/config-info).
deletes a configuration (rm -r configs/<config>).
edits the ThornList.
copies all the example parameter files relevant for this configuration to the directory examples in the Cactus home directory. If a file of the same name is already there, it will not overwrite it.
removes from a configuration all object and dependency files, as well as files generated from the CST (stands for Cactus Specification Tool, which is the set of Perl scripts which parse the thorn configuration files). Only the files generated by configure and the ThornList file remain.
rebuilds a configuration (reruns the CST).
reconfigures an existing configuration using its previous configuration options from the file configs/<config>/config-info.
runs the test programs associated with each thorn in the configuration. See section B2.6 for information about the test suite mechanism.
builds documentation for the thorns in this configuration (see section B2.5, page B30, for other targets to build documentation for thorns).
regenerates the ThornList for a configuration.
builds all utility programs provided by the thorns of a configuration. Individual utilities can be selected by giving their names (i.e. name of the source file without extension) in the UTILS variable.
Cactus will try to compile all thorns listed in configs/<config>/ThornList. The ThornList file is simply a list of the form <arrangement>/<thorn>. All text after a pound sign ‘#’ or exclamation mark ‘!’ on a line is treated as a comment and ignored. If you did not specify a ThornList already, the first time that you compile a configuration you will be shown a list of all the thorns in your arrangement directory, and asked if you with to edit them. You can regenerate this list at anytime by typing
or you can edit it using
Instead of using the editor to specify the thorns you want to have compiled, you can edit the ThornList outside the make process. It is located in configs/<config>/ThornList, where <config> refers to the name of your configuration. The directory ./configs exists after the very first make phase for the first configuration.
If during the build you see the error “missing separator”, you are probably not using GNU make.
The EDITOR environment variable. You may not be aware of this, but this thing very often exists and, may be set by default to something scary like vi. If you don’t know how to use vi, or wish to use your favorite editor instead, reset this environment variable. (To exit vi type <ESC> :q!)
An option for gmake can be thought of as an argument which tells it how it should make a target. Note that the final result is always the same.
turns off all prompts from the make system.
prints the commands that gmake is executing.
shows compiler warnings during compilation.
compiles in parallel, across files within each thorn.
compiles in parallel, across thorns.
Note that with more modern versions of gmake, it is sufficient to pass the normal -j <number> flag to gmake to get parallel compilation.
lists all make options.
prints configuration options for every configuration found in user’s configs subdirectory.
creates a new configuration with a default name.
deletes your configs directory, and hence all your configurations.
removes non-essential files as documents and test suites to allow for minimal installation size.
creates a new thorn, prompting for the necessary information and creating template files.
creates an Emacs style TAGS file. See section D7 for using tags within Cactus.
creates a vi style tags file. See section D7 for using tags within Cactus.
Targets to generate Cactus documentation:
builds the documentation for the arrangement.
builds the documentation for all arrangements.
runs LaTeX to produce a copy of the Maintainers’ Guide.
runs LaTeX to produce a copy of the Reference Manual.
builds the documentation for the thorn.
builds the documentation for all thorns.
runs LaTeX to produce a copy of the Users’ Guide.
creates all of the above documentations.
Some thorns come with a test suite, consisting of test parameter files and the output files generated by running these. To run the test suite for the all thorns you have compiled use
gmake <configuration>-testsuite
which interactively query for which tests to run and how many MPI processes to use.
You can use environment variables or variables set on the gmake command line to choose defaults for these for non-interactive use.
Setting CCTK_TESTSUITE_RUN_TESTS to a space separated list of thorn and thorn/test entries lets you choose which tests to run.
Setting CCTK_TESTSUITE_PARALLEL_TESTS to a non-zero value lets you run that many tests simulataneously. Depending on your MPI stack used this may require disabling automatic core binding avoid binding rank 0 of multiple tests to the same compute core.
Setting TESTS_DIR lets you choose the directory where tests are run in, by default this is the TEST directory in the Cactus main directory.
Setting CCTK_TESTSUITE_RUN_PROCESSORS chooses the number MPI processes (ranks) to use. It defaults to \(2\).
Setting CCTK_TESTSUITE_RUN_COMMAND sets the command to execute to start a single test. Cactus will replace the strings $nprocs, $exe, and $parfile by the requested number of MPI processes, the Cactus executable of the configuration being tested and the test parameter file. It defaults to mpirun -np $nprocs $exe $parfile if MPI is used and $exe $parfile otherwise.
Setting PROMPT to no skips the interactive prompts and uses the (potentially customized) defaults.
These test suite serve the dual purpose of
i.e. making sure that changes to the thorn or the flesh don’t affect the output from a known parameter file.
i.e. checking that the results are independent of the architecture—this is also of use when trying to get Cactus to work on a new architecture.
This chapter covers all aspects for running your Cactus executable. These include: command-line options, parameter file syntax, understanding screen output, environment variables, and creating thorn documentation.
Cactus uses the standard GNU style of long-named command-line options; many of these options also have traditional Unix single-letter short forms. The options follow the usual GNU rules:
A long-named option --foo which takes an argument bar may be written as either --foo bar or
as --foo=bar.
A long-named option may be abbreviated, so long as the abbreviation is unambiguous.
The preferred way of spelling a long-named option is --foo, but -foo also accepted, though this is
deprecated.
A short option, -X, which takes an argument bar may be written as either -Xbar or as -X=bar.
An option which can be interpreted as either a short option, or as an abbreviated -foo-style
long option, is interpreted as the former. In particular, -re is interpreted as an abbreviation for
-redirect, rather than as -r=e.
The Cactus command-line options are specified in Table B3.1, and are as follows:
| Short Version | Long Version |
| -O[v] | --describe-all-parameters |
| -o<param> | --describe-parameter=<param> |
| -S | --print-schedule |
| -T | --list-thorns |
| -t<arrangement/thorn> | --test-thorn-compiled=<arrangement/thorn> |
| -h,-? | --help |
| -v | --version |
| -L<level> | --logging-level=<level> |
| -W<level> | --warning-level=<level> |
| -E<level> | --error-level=<level> |
| -r[o|e|oe|eo] | --redirect=[o|e|oe|eo] |
| -R[o|e|oe|eo] | --Redirect=[o|e|oe|eo] |
| --logdir=<directory> | |
| -b[no|line|full] | --buffering=[no|line|full] |
| --parameter-level=<strict|normal|relaxed> | |
| -i | --ignore-next |
Prints a full list of all parameters from all thorns which were compiled, along with descriptions and allowed values. This can take an optional extra parameter v (i.e. -Ov to give verbose information about all parameters).
Prints the description and allowed values for a given parameter—takes one argument.
Print only the schedule tree.
Prints a list of all the thorns which were compiled in.
Checks if a given thorn was compiled in—takes one argument.
Prints a help message.
Prints version information of the code.
Sets the logging level of the code. All warning messages are given a level—the lower the level the greater the severity. This parameter -L controls the level of messages to be seen, with all warnings of level \(\le \) <level> printed to standard output. The default is a logging level of 0, meaning that only level 0 messages should be printed to standard output.
Similar to -W, but for standard error instead of standard output. All warnings of level \(\le \) <level> are printed to standard error. The default is a warning level of 1, meaning that level 0 and level 1 messages should be printed to standard error.
Similar to -W, but for fatal errors: Cactus treats all warnings with level \(\le \) <level> as fatal errors, and aborts the Cactus run immediately (after printing the warning message1 ). The default value is zero, i.e. only level 0 warnings will abort the Cactus run.
Redirects the standard output (‘o’) and/or standard error (‘e’) of each processor to a file. By default, the standard outputs from processors other than processor 0 are discarded.
Redirects the standard output (‘o’) and/or standard error (‘e’) of each processor to a file like -r does, however different from -r it also redirects standard output and/or standard error from processor 0.
Sets the output directory for logfiles created by the -r option. If the directory doesn’t exist yet, it will be created by Cactus.
Set the stdout buffering mode. Buffered I/O is a standard feature of C programmes. This delays writing the actual output; instead, the output is collected into an internal buffer, and is then written in large chunks. This improves performance considerably. Line buffering means that output is written whenever a newline character is encountered; full buffering means that output is written, say, once 1000 characters have accumulated. The default setting is line buffering for I/O that goes to a terminal, and full buffering for I/O that goes to a file. For debugging purposes, it is sometimes useful to reduce the amount of buffering. Error messages, i.e. the stderr stream, is always unbuffered (and hence usually slower than stdout).
Sets the level of parameter checking to be used, one of strict (the default), normal, or relaxed. See Section B3.2 for details.
Causes the next argument on the command line to be ignored.
A dash (“-”) appended at the end of the command line like this:
./cactus_<config> [command-line options] -
lets the user specify parameter values from standard input rather than from a parameter file.
A parameter file (or par file) is used to control the behaviour of a Cactus executable. It specifies initial values for parameters as defined in the various thorns’ param.ccl files (see Chapter C1.4). The name of a parameter file is often given the suffix .par, but this is not mandatory.
A parameter file is a text file whose lines are either blank lines, or parameter statements. Comments may also be
included and consist of a ‘#’ and all following characters. A parameter statement is an expression of the form
Left-Hand-Side = Right-Hand-Side. The Left-Hand-Side may be a fully qualified parameter name (i.e. a thorn or
implementation name, two colons, and a name defined in a param.ccl file), a variable name (the ‘$’
character followed by a C-identifier), or the special variable ActiveThorns. The Right-Hand-Side is a
value.
Values can be any of the following (all of which are case insensitive):
Booleans: Booleans are either true (i.e. 1, true, on, "true", or "on") or false (i.e. 0, false, off,
"false", or "off").
Integers: Integers can be positive or negative.
Real numbers: Real numbers can be positive or negative and may be written with exponents (e.g.
1.0e-3, or -2.94d+10).
Keywords: For keyword parameters, only the values enumerated in the parameter file are allowed. Like booleans, keywords may be put inside quotes. If they contain characters other than those found in C-identifiers, they must be.
Strings: Sequences of characters delimited by quotes. If a quote is preceded by a backslash, it is not counted as a closing quote. A sequence of two backslashes will be interpreted as a single backslash.
Variables: Parameter values can also contain variables of the form ${VARIABLE} or $ENV{VARIABLE}. In the
first form, braces are required when VARIABLE is followed by a character which is not to be interpreted as
part of its name and optional otherwise. The second form provides access to all environment variables
defined in the environment of the executable. Table B3.2 provides a list of recognized variable strings.
| variable string | expands to |
$ENV{envname} | the value of the environment variable $envname |
$parfile | the path to the variable file with .par removed at the end |
$pi | the numerical value of \(\pi \) |
In addition to the above, it is possible to create and use other variables by assignment, e.g.
$my_factor = 0.5
CoordBase::dx = 3.0*$my_factor
CoordBase::dy = 3.0*$my_factor
Expressions: Parameters statements of numeric or boolean type can use arithmetic expressions in place of
explicit values. The usual arithmetic operations as well as C-like transcendental functions and relational
operations are supported. Integer division is handled as in C. Logical comparisons and variables expect
a boolean type. The exponentiation operator ** is supported, but can only apply to two
values. The expression 3**4**2 is not supported, but (3**4)**2 or 3**(4**2) is supported.
Operator precedence follows the C language, but when in doubt use explicit parenthesis to force a
desired order of evaluation. Table B3.3 lists the supported functions. Expressions can refer to
parameters which are already set by using the fully qualified name thorn::parameter as described
below.
The % operator is applicable only to integers. In cases where this is clear, types will be converted, e.g. 3.0
will convert to an integer, but not 3.1. If you wish to prevent the parser from evaluating an expression,
you can put it in double quotes and make it a string.
Array assignments:
Arrays of parameters can be set by including an integer expression inside the square brackets following the name, e.g. thorn::parameters[0]. Optionally, an array of parameters may be set by means of a comma delimited list of values inside square brackets. E.g. the following two examples are equivalent.
Example 1:
thorn::parameters[0] = 4.8
thorn::parameters[1] = 3.2
Example 2:
thorn::parameters = [4.8, 3.2]
Please see the file par.peg in the directory Cactus/src/piraha/pegs for the full grammar describing the par file.
| Logical operators | ! | logical not | |
&& | logical and | Mathematical functions
| |
|| | logical or | acos | inverse cosine |
| Relational operators | asin | inverse sine | |
== | tests for equality | atan | inverse tangent |
!= | tests for inequality | ceil | round up to nearest integer |
< | tests for less than | cos | cosine |
> | tests for greater than | cosh | hyperbolic cosine |
<= | tests for less or equal | exp | exponentiation \(e^x\) |
>= | tests for greater or equal | abs | absolute value \(|x|\) |
| Binary operators | floor | round down to nearest integer | |
+ | addition | log | natural logarithm |
- | subtraction | bool,int,real | convert to bool, int, or real |
/ | C-like division | sin | sine |
% | remainder of division | sinh | hyperbolic sine |
* | multiplication | sqrt | square root |
** | exponentiation \(x^y\) | cbrt | cube root |
| Unary operators | tan | tangent | |
- | negate sign | tanh | hyperbolic tangent |
+ | no-op | trunc | integer part of \(x\) |
Every parameter file should set ActiveThorns, which is a special parameter that tells the program which thorns are to be activated. One may set ActiveThorns on any line or lines of the par file. In the case where multiple specifications of ActiveThorns are supplied, the values will be concatenated.
Only parameters belonging to active thorns can be set (and only those routines scheduled by active thorns are run). By default, all thorns are inactive. For example, the first entry in a parameter file which is using just the two thorns CactusPUGH/PUGH and CactusBase/CartGrid3D should be
ActiveThorns = "PUGH CartGrid3D"
All parameters following the ActiveThorns parameter have names whose syntax depends on the scope (see Section C1.4.2) of the parameter:
The name of the implementation which defined the parameter, followed by two colons, then the name of the parameter—e.g. driver::global_nx.
The name of the thorn which defined the parameter, two colons, and the name of the parameter—e.g. wavetoyF77::amplitude.
This notation is not currently strictly enforced in the code. It is sufficient to specify the first part of the parameter name using either the implementation name, or the thorn name. However, we recommend that the above convention be followed.
The Cactus flesh performs checks for consistency and range of parameters. The severity of these checks is controlled by the command-line argument --parameter-level, which can take the following values
Cactus will issue a level 0 warning (that is, the default behaviour will be to terminate) if
The specified parameter value is outside of the allowed range.
This provides the same warnings as the relaxed level, with the addition of a level 0 warning issued for
An implementation and/or thorn foo is active, but the parameter foo::bar was not defined.
The parameter foo::bar was successfully set for both an active implementation foo not implemented by a thorn foo, and to a thorn foo.
This is the default, and provides the same warnings as the normal level, with the addition of a level 0 warning issued for
The parameter foo::bar is specified in the parameter file, but no implementation or thorn with the name bar is active.
Notes:
You can obtain lists of the parameters associated with each thorn using the command-line options -o and -O (Section B3.1).
String parameter values can be specified either as unquoted tokens (not containing any whitespace), or as quoted values. If a quoted string parameter value spans multiple lines, all whitespaces, including newline characters, are preserved.
Some parameters are steerable, and can be changed during the execution of a Cactus program using parameter steering interfaces, for example, thorn CactusConnect/HTTPD, or using a parameter file when recovering from a checkpoint file.
For examples of parameter files, look in the par directory contained in most thorns.
The Cactus make system provides a mechanism for generating a Thorn Guide containing separate chapters for each thorn and arrangement in your configuration. The documentation provided for an individual thorn, obviously depends on what the thorn authors added, but the Thorn Guide is a good place to first look for special instructions on how to run and interpret the output from a thorn. Details about parameters, grid variables and scheduling are automatically read from a thorn’s CCL files and included in the Thorn Guide. To construct a Thorn Guide for the configuration \(<\)config\(>\) use
gmake \(<\)config\(>\)-ThornGuide
or to make a Thorn Guide for all the thorns in the arrangements directory
gmake \(<\)config\(>\).
See Section C1.8.4 for a guide to adding documentation to your own thorns.
As your Cactus executable runs, standard output and standard error are usually written to the screen. Standard output provides you with information about the run, and standard error reports warnings and errors from the flesh and thorns.
As the program runs, the normal output provides the following information:
A report is made as each of the thorns in the ActiveThorns parameters from the parameter file (see Section B3.2) is attempted to be activated. This report shows whether the thorn activation was successful, and if successful, gives the thorn’s implementation. For example
Activating thorn idscalarwave...Success -> active implementation idscalarwave
If any of the parameters in the parameter file does not belong to any of the active thorns, or if the parameter value is not in the allowed range (see Section C1.4.1), an error is registered. For example, if the parameter is not recognised,
Unknown parameter time::ddtfac
or if the parameter value is not in the allowed range,
Unable to set keyword CartGrid3D::type - ByMouth not in any active range
The scheduled routines (see Section C1.5) are listed, in the order that they will be executed. For example,
----------------------------------------------------------------------
Startup routines
Cactus: Register banner for Cactus
CartGrid3D: Register GH Extension for GridSymmetry
CartGrid3D: Register coordinates for the Cartesian grid
IOASCII: Startup routine
IOBasic: Startup routine
IOUtil: IOUtil startup routine
PUGH: Startup routine
WaveToyC: Register banner
Parameter checking routines
CartGrid3D: Check coordinates for CartGrid3D
IDScalarWave: Check parameters
Initialisation
CartGrid3D: Set up spatial 3D Cartesian coordinates on the GH
PUGH: Report on PUGH set up
Time: Set timestep based on speed one Courant condition
WaveToyC: Schedule symmetries
IDScalarWave: Initial data for 3D wave equation
do loop over timesteps
WaveToyC: Evolution of 3D wave equation
t = t+dt
if (analysis)
endif
enddo
----------------------------------------------------------------------
Usually a thorn registers a short piece of text as a banner. The banner of each thorn is displayed in the standard output when the thorn is initialised.
Output methods in Cactus are all provided by thorns. Any number of output methods can be used for each run. The behaviour of the output thorns in the standard arrangements are described in those thorns’ documentation.
In general, output thorns decide what to output by parsing a string parameter containing the names of those grid variables, or groups of variables, for which output is required. The names should be fully qualified with the implementation and group or variable names.
There is usually a parameter for each method to denote how often, in evolution iterations, this output should be performed. There is also usually a parameter to define the directory in which the output should be placed, defaulting to the directory from which the executable is run.
See Chapter C2.7 for details on creating your own I/O method.
C3
This chapter goes into the nitty-gritty of writing a thorn. It introduces key concepts for thorns, then goes on to give a brief outline of how to configure a thorn. There is then some detail about concepts introduced by the configuration step, followed by discussion of code which you must put into your files in order to use Cactus functionality, and details of utility functions you may use to gain extra functionality.
A thorn is the basic working module within Cactus. All user supplied code goes into thorns, which are, by and large, independent of each other. Thorns communicate with each other via calls to the flesh API, plus, more rarely, custom APIs of other thorns.
The connection from a thorn to the flesh, or to other thorns, is specified in configuration files which are parsed at compile time and used to generate glue code which encapsulates the external appearance of a thorn.
Thorn names must be (case independently) unique, must start with a letter, can only contain letters, numbers or underscores, and must contain 27 characters or less. In addition, a thorn cannot have the name doc, this is reserved for arrangement documentation. Arrangement names which start with a ‘#’, or finish with ‘~’ or ‘.bak’ will be ignored.
Thorns are grouped into arrangements. This is a logical grouping of thorns which is purely for organisational purposes. For example, you might wish to keep all your initial data thorns in one arrangement, and all your evolution thorns in another arrangement, or you may want to have separate arrangements for your developments, private and shared thorns.
The arrangements live in the arrangements directory of the main Cactus directory. Arrangement names must be (case independently) unique, must start with a letter, and can only contain letters, numbers or underscores. Arrangement names which start with a ‘#’, or finish with ‘~’ or ‘.bak’ will be ignored.
Inside an arrangement directory there are directories for each thorn belonging to the arrangement.
One of the key concepts for thorns is the concept of the implementation. Relationships among thorns are all based upon relationships among the implementations they provide. In principle, it should be possible to swap one thorn providing an implementation with another thorn providing that implementation, without affecting any other thorn.
An implementation defines a group of variables and parameters which are used to implement some functionality. For example, the thorn CactusPUGH/PUGH provides the implementation driver. This implementation is responsible for providing memory for grid variables and for communication. Another thorn can also implement driver, and both thorns can be compiled in at the same time. At runtime, the user can decide which thorn providing driver is used. No other thorn should be affected by this choice.
When a thorn decides it needs access to a variable or a parameter provided by another thorn, it defines a relationship between itself and the other thorn’s implementation, not explicitly with the other thorn. This allows the transparent replacement, at compile or runtime, of one thorn with another thorn providing the same functionality as seen by the other thorns.
A thorn consists of a subdirectory of an arrangement containing four administrative files:
the Cactus interface, which defines the grid functions, variables, etc. See Appendix D2.2.
the parameters introduced by this thorn, and the parameters needed from other thorns. See Appendix D2.3.
scheduling information for routines called by the flesh. See Appendix D2.4.
configuration options for the thorn. See Appendix D2.5.
Thorns can also contain
a subdirectory called src, which should hold source files and compilation instructions for the thorn
a subdirectory src/include for include files
a README containing a brief description of the thorn
a doc directory for documentation
a par directory for example parameter files
a test subdirectory may also be added, to hold the thorn’s test suite. See Section C1.8.5 for details.
To simplify the creation of a thorn, a make target gmake newthorn has been provided. When this is run:
You will be prompted for the name of the new thorn.
You will be prompted for the name of the arrangement in which you would like to include your thorn. Either enter a new arrangement name or pick one from the list of available arrangements that are shown.
The interaction of a thorn with the flesh and other thorns is controlled by certain configuration files.
These are:
This defines the implementation (Section C1.1.3) the thorn provides, and the variables the thorn needs, along with their visibility to other implementations.
This defines the parameters that are used to control the thorn, along with their visibility to other implementations.
This defines which functions are called from the thorn and when they are called. It also handles memory and communication assignment for grid variables.
This file is optional for a thorn. If it exists, it contains extra configuration options of this thorn.
Cactus Configuration Language (CCL) files are text files used to define configuration information for a thorn. Their formal syntax is described using Piraha, a parsing expression grammar engine that supports multiple languages (see https://github.com/stevenrbrandt/piraha-peg for a description of Piraha patterns and Grammar Files).
A Grammar File for each type of CCL file is provided in the src/piraha/pegs directory of the Cactus source tree. These may be consulted for the precise details of any given Cactus CCL file.
CCL files are (mostly) case independent, and may contain comments introduced by the hash ‘#’ character, which indicates that the rest of the line is a comment. If the last non-blank character of a line in a CCL file is a backslash ‘\(\backslash \)’, the following line is treated as a continuation of the current line.
The interface.ccl file is used to declare
the implementation provided by the thorn
the variables provided by the thorn
the include files provided by the thorn
the functions provided by the thorn (in development)
The implementation is declared by a single line at the top of the file
There are three different access levels available for variables
Can be ‘inherited’ by other implementations (see below).
Can be shared with other implementations which declare themselves to be friends of this one (see below).
Can only be seen by this thorn.
Corresponding to the first two access levels there are two relationship statements that can be used to get variables (actually groups of variables, see below) from other implementations.
This gets all Public variables from implementation <name>, and all variables that <name> has in turn inherited. An implementation may inherit from any number of other implementations.
This gets all Protected variables from implementation <name>, but, unlike inherits, it is symmetric and also defines a transitive relation by pushing its own implementation’s Protected variables onto implementation name. This keyword is used to define a group of implementations which all end up with the same Protected variables.
So, for example, an interface.ccl starting
Cactus variables, described in Chapter C1.3, are placed in groups with homogeneous attributes, where the attributes describe properties such as the data type, group type, dimension, ghostsize, number of timelevels, and distribution.
For example, a group, called realfields of 5 real grid functions (phi, a, b, c, d), on a 3D grid, would be defined by
CCTK_REAL realfields type=GF TimeLevels=3 Dim=3
{
phi
a,b,c,d
} "Example grid functions"
or, for a group called intfields consisting of just one distributed 2D array of integers,
CCTK_INT intfields type=ARRAY size=xsize,ysize ghostsize=gxsize,gysize dim=2
{
anarray
} "My 2D arrays"
where xsize, ysize, gxsize, gysize are all parameters defined in the thorn’s param.ccl.
By default, all groups are private, to change this, an access specification of the form public: or protected: (or private: to change it back) may be placed on a line by itself. This changes the access level for any group defined in the file from that point on.
All variables seen by any one thorn must have distinct names.
Users control the operation of thorns via parameters given in a file at runtime. The param.ccl file is used to specify the parameters used to control an individual thorn, and to specify the values these parameters are allowed to take. When the code is run, it reads a parameter file and sets the parameters if they fall within the allowed values. If a parameter is not assigned in a parameter file, it is given its default value.
There are three access levels available for parameters:
These parameters are seen by all thorns.
These parameters may be used by other implementations if they so desire.
These are only seen by this thorn.
A parameter specification consists of:
The parameter type (each may have an optional CCTK_ in front)
A distinct string with only a few known allowed values.
An arbitrary string, which must conform to a given regular expression.
A boolean type which can take values 1, t, true, yes or 0, f, false, no.
The parameter name
An optional size (in square brackets)–if this is present, the parameter is a “parameter array”, i.e. it will actually be an array of parameters, each of which has the same properties, but a different value. Such arrays appear as normal arrays in C or Fortran, 0-based in C, and 1-based in Fortran. In the parameter file the value of each element is specified with square brackets and is 0-based. The size must be an integer.
A description of the parameter
An allowed value block–this consists of a brace-delimited block of lines1 describing the allowed values of the parameter. Each range may have a description associated with it by placing a :: on the line, and putting the description afterwards.
The default value–this must be one of the allowed values.
For the numeric types INT and REAL, a range consists of a string of the form lower-bound:upper-bound:step, where a missing number or an asterisk ‘*’ denotes anything (i.e. infinite bounds or an infinitesimal step).
For example,
REAL Coeff "Important coefficient"
{
0:3.14 :: "Range has to be from zero to Pi, default is zero"
} 0.0
#No need to define a range for BOOLEAN
BOOLEAN nice "Nice weather?"
{
}"yes"
# A example for a set of keywords and its default (which has to be
# defined in the body)
KEYWORD confused "Are we getting confused?"
{
"yes" :: "absolutely positively"
"perhaps" :: "we are not sure"
"never" :: "never"
} "never"
REAL Length[2] "Length in each direction"
{
0:* :: "Range has to be from zero to infinity, default is one"
} 1.0
defines a REAL parameter, a BOOLEAN parameter, a KEYWORD, and an array of REAL parameters.
By default, all parameters are private; to change this, an access specification of the form global: or restricted: (or private: to change it back) may be placed on a line by itself. This changes the access level for any parameter defined in the file from that point on.
To access restricted parameters from another implementation, a line containing shares: <name> declares that all parameters mentioned in the file, from now until the next access specification, originate in implementation <name>. (Note that only one implementation can be specified on each shares: line.) Each of these parameters must be qualified by the initial token USES or EXTENDS, where
indicates that the parameters range remains unchanged.
indicates that the parameters range is going to be extended.
In contrast to parameter declarations in other access blocks, the default value must be omitted—it is impossible to set the default value of any parameter not originating in this thorn. For example, the following block adds possible values to the keyword initial_data originally defined in the implementation einstein, and uses the REAL parameter speed.
shares:einstein
EXTENDS KEYWORD initial_data
{
"bl_bh" :: "Brill Lindquist black holes"
"misner_bh" :: "Misner black holes"
"schwarzschild" :: "One Schwarzschild black hole"
}
USES CCTK_REAL speed
Note that you must compile at least one thorn which implements einstein.
By default, no routine of a thorn will be run. The schedule.ccl file defines those that should be run, and when and under which conditions they should be run.
The specification of routine scheduling is via a schedule block which consists of lines of the form
For routines, run before the grid hierarchy is set up, for example, function registration.
For routines that check parameter combinations, routines registered here only have access to the grid size and the parameters.
Responsible for setting up coordinates, etc.
For generating initial data.
Tasks which must be applied after initial data is created.
Stuff done before the evolution step.
The evolution step.
Stuff done after the evolution step.
For analysing data.
The other options allow finer-grained control of the scheduling. It is possible to state that the routine must run BEFORE or AFTER another routine or set of routines. It is also possible to schedule the routine under an alias name by using AS <alias_name>.
The LANG keyword specifies the linkage of the scheduled routine which determines how to call it from the scheduler. C and Fortran linkage are possible here. C++ routines should be defined as extern "C" and registered as LANG: C.
Schedule options are used for mesh refinement and multi-block simulations, and they determine “where” a routine executes. Often used schedule options are local (also the default, may be omitted), level, or global. Routines scheduled in local mode can access individual grid points, routines scheduled in level mode are used e.g. to select boundary conditions, and routines schedule in global mode are e.g. used to calculate reductions (norms).
Schedule tags, e.g. Device=1 to specify that a routine executes on an OpenCL or CUDA device instead of on the host.
The STORAGE keyword specifies any groups for which memory should be allocated for the duration of the routine. The storage status reverts to its previous status after the routine returns. The format of the STORAGE statement includes specifying the number of timelevels of each group for which storage should be activated.
STORAGE: <group1>[timelevels1], <group2>[timelevels2]
This number can range from one to the maximum number of timelevels for the group, as specified in the group definition in its interface.ccl file. If this maximum number is one, the timelevel specification can be omitted from the STORAGE statement. Alternatively timelevels can be the name of a parameter accessible to the thorn. The parameter name is the same as used in C routines of the thorn, fully qualified parameter names of the form thorn::parameter are not allowed. In this case 0 (zero) timelevels can be requested, which is equivalent to the STORAGE statement being absent.
READS/WRITES are used to declare which grid variables are read/written by the routine. This information is used e.g. to determine which variables need to be synchronized, copied between host and device for OpenCL or CUDA kernel, or poisoned as part of error checking.
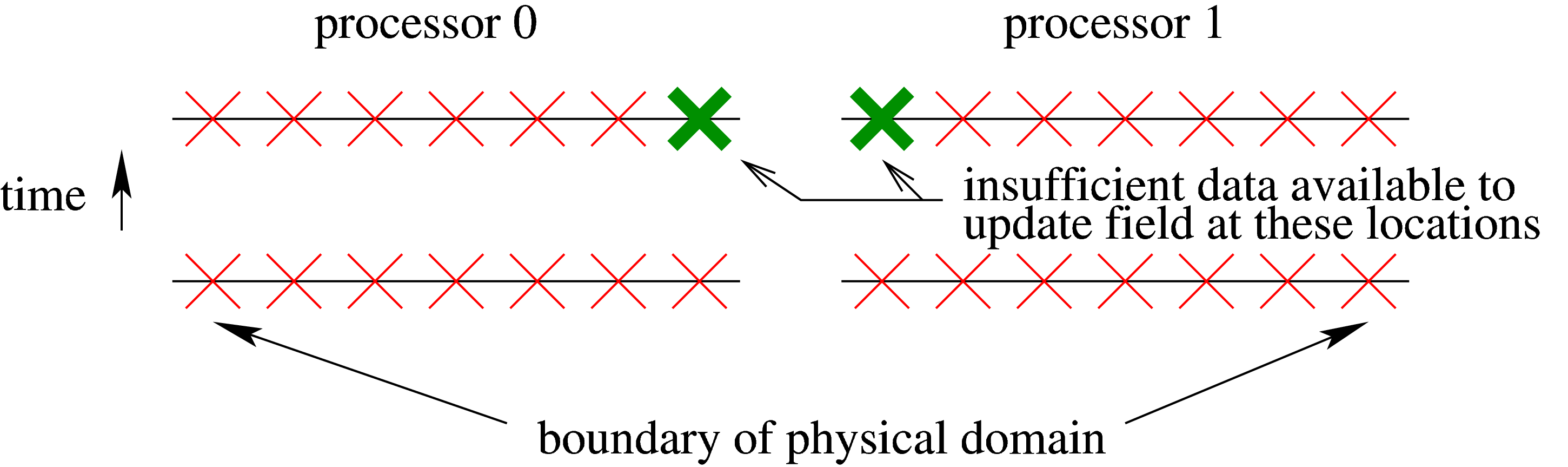
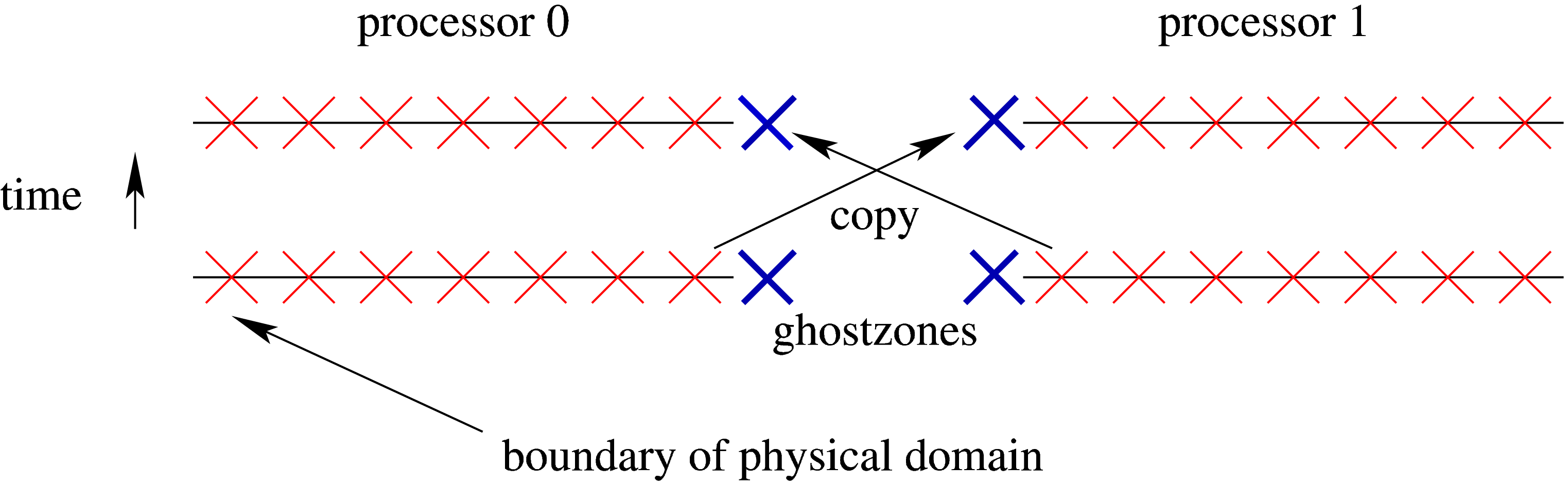
READS/WRITE directives can be applied to either a variable or a group of variables and may also contain a region specification. The region specification can be EVERYWHERE, INTERIOR, or BOUNDARY. If a function needs to read a given grid function everywhere and only the interior is valid (i.e. has been written to), then a synchronization is required and will happen automatically if enabled with the Cactus parameter presync_mode.
When grid functions are updated in this way, not only ghost zones, but boundary zones will be updated by the drier. Use either the function Driver_SelectGroupForBC or Driver_SelectVarForBC to tell the driver how it should update a group or variable. The arguments to both functions are the same as those found in the Boundary thorn, but with the prefix Boundary_ instead of Driver_:
Driver_SelectGroupForBC(CCTK_ARGUMENTS,
CCTK_INT faces,
CCTK_INT width,
CCTK_INT table_handle,
CCTK_STRING group_name,
CCTK_STRING bc_name)
Driver_SelectVarForBC(CCTK_ARGUMENTS,
CCTK_INT faces,
CCTK_INT width,
CCTK_INT table_handle,
CCTK_STRING var_name,
CCTK_STRING bc_name)
Note that the above two functions, unlike their similarly named components in the Boundary thorn, only need to be called once. The information they provide will then be used each time the driver synchronizes the named grid function or group.
It is possible, however, that the thorn you are creating does not know the correct READS/WRITES information at compile time. I/O thorns, for example, do not know which grid functions they will access until run time. Likewise, the Method of Lines thorn does not know which grid functions it is operating on until run time.
For situations like these, we have the following functions which can be used to check READS/WRITES data and perform synchronization at run time: Driver_RequireValidData, Driver_NotifyDataModified, Driver_GetValidRegion, and Driver_SetValidRegion. For details on these functions, please consult the Reference Manual.
TRIGGERS is used when the routine is registered at ANALYSIS. This is a special time bin; a routine registered here will only be called if one of the variables from a group in TRIGGERS is due for output. (A routine without TRIGGERS declaration will always be called.)
The keyword SYNC specifies groups of variables which should be synchronised (that is, their ghostzones should be exchanged between processors) on exit from the routine. Specifying synchronisation of grid variables in schedule.ccl is an alternative to calling the functions CCTK_SyncGroup() or CCTK_SyncGroupsI() (see the Reference Manual) from inside a routine. Using the SYNC keyword in the schedule.ccl is the preferred method, since it provides the flesh with more information about the behaviour of your code.
As an alternative to this mechanism, synchornization can happen automatically as variables are read/written.
Besides schedule blocks, it’s possible to embed C style if/else statements in the schedule.ccl file. These can be used to schedule things based upon the value of a parameter.
Example I:
If the parameter evolve_hydro is positively set, the Fortran routine hydro_predictor is scheduled to run in the evolution loop, after the routine metric_predictor and before metric_corrector. The routine names metric_predictor and metric_corrector, may either be real routine names from the same or a different thorn, or they may be aliased routine names (see the next example).
Before entry to hydro_predictor, storage will be allocated for one timelevel for the group of grid variables hydro_variables on exit from the routine this storage will be deallocated and the contents of the variables will be lost.
if(CCTK_Equals(evolve_hydro,"yes"))
{
SCHEDULE hydro_predictor AT evol AFTER metric_predictor BEFORE metric_corrector
{
LANG: FORTRAN
STORAGE: hydro_variables[1]
} "Do a predictor step on the hydro variables"
}
If the parameter evolve_hydro is set negatively, the hydro_predictor routine will not be called by the scheduler. Note that if the evolve_hydro parameter is STEERABLE, it can be dynamically scheduled and de-scheduled during a run if a steering interface is available.
Example II:
The thorns WaveToy77 and WaveToyC, each provide a routine to evolve the 3D wave equation: WaveToyF77_Evolution and WaveToyC_Evolution. The routine names have to be different, so that both thorns can be compiled at the same time, their functionality is identical though. Either one of them can then be activated at run time in the parameter file via ActiveThorns.
Since each evolution routine provides the same functionality, it makes sense to schedule them under the common alias WaveToy_Evolution to allow relative scheduling (BEFORE/AFTER) independent of the actual routine name (which may change depending on the activation in the parameter file).
In both cases, the group of variables scalarfield are synchronised across processes when the routine is exited.
schedule WaveToyF77_Evolution AS WaveToy_Evolution AT evol
{
LANG: Fortran
STORAGE: scalartmps
SYNC: scalarfield
} "Evolution of 3D wave equation"
schedule WaveToyC_Evolution AS WaveToy_Evolution AT evol
{
LANG: C
STORAGE: scalartmps
SYNC: scalarfield
} "Evolution of 3D wave equation"
The thorn IDScalarWave schedules the routine WaveBinary after the alias WaveToy_Evolution. It is scheduled independently of the C or Fortran routine name.
schedule WaveBinary AT evol AFTER WaveToy_Evolution
{
STORAGE: wavetoy::scalarevolve
LANG: Fortran
} "Provide binary source during evolution"
Storage Outside of Schedule Blocks The keyword STORAGE can also be used outside of the schedule blocks to indicate that storage for these groups should be switched on at the start of the run. Note that the storage is only allocated in this way at the start; a thorn could explicitly switch the storage off (although this is not recommended practise). As for the STORAGE statement in schedule blocks, each group must also specify how many timelevels to activate storage for.
The configuration.ccl file is optional. It can be used for two purposes: to detect certain features of the host system, such as the presence or absence of libraries, variable types, etc, or the location of libraries; or to provide access to certain functions too complex or otherwise not suitable for function aliasing.
The basic concept here is that a thorn can either provide or use a capability. A thorn providing a capability can specify a script which is run by the CST to detect features and write any configuration files; the script may output lines to its standard output to inform the CST of features to: add to the header files included by thorns using this capability; add to the make files used to build thorns using this capability; or add to the main Cactus link line. The script may also indicate that this capability is not present by returning a non-zero exit code—e.g. if the thorn is providing access to an external library, it should return an error if the library is not installed on the system.
A thorn may either require a capability to be present, in which case it is an error if there is no thorn providing that capability in the configuration’s ThornList, or it may optionally use a capability, in which case a macro is defined in the thorn’s header file if a thorn providing the capability is present.
A configuration.ccl file has the form:
which states that this thorn provides the capability My_Capability, and a script MyConfigScript should be run
to detect features of this capability; the script is in language My_Language—the CST will use the appropriate
environment or interpreter to invoke the script.
The syntax of the output of the configure script is described in Appendix D2.5.1.
The make system uses file extensions to designate coding language, as well as other properties of the code in the file.
The following extensions are understood:
| Extension | Language | Preprocess | |
| .c | C | yes | |
| .cc or .C | C++ | yes | |
| .cl | OpenCL | yes | |
| .cu | CUDA | yes | |
| .F or .F77 | Fortran (fixed-format) | yes | |
| .f or .f77 | Fortran (fixed-format) | no | |
| .F90 | Fortran (free-format) | yes | |
| .f90 | Fortran (free-format) | no | |
In order to use Cactus #include directives in a file, it must be preprocessed.
A complete description of Fortran fixed and free format can be found in any textbook on Fortran. The most obvious differences are that in fixed format, code must begin after the 5th column and line continuations are indicated by a character in column 5, while in free format, lines can begin anywhere, and line continuations are indicated by an ampersand at the end of the line to be continued. Also note that statement labels are handled very differently.
The following restrictions apply to file names:
For portability across all operating systems, the base names for any particular extension should not depend on the operating system being case sensitive (e.g. having MyFile.c and MYFILE.f is allright, but MyFile.c and MYFILE.c could cause problems).
Currently, all source files within a thorn must have distinct names, regardless of whether they are placed in different subdirectories. We hope to relax this in future. Different thorns may have files with the same names, however.
By default, the CCTK looks in the src directory of the thorn for source files.
There are two ways in which to specify the sources. The easiest is to use the make.code.defn based method in which the CCTK does all the work, but you may instead put a Makefile in the src directory and do everything yourself.
This is the standard way to compile your thorn’s source files. The Cactus make system looks for a file called make.code.defn in that directory (if there is no file called Makefile in the src directory). At its simplest, this file contains two lines
SRCS = <list of all source files in this directory>
SUBDIRS = <list of all subdirectories, including subdirectories of subdirectories>
Each subdirectory listed should then have a make.code.defn file containing just a SRCS = line, a SUBDIRS = line will be ignored.
In addition, each directory can have a make.code.deps file, which, for files in that directory, can contain additional make rules and dependencies for files in that directory. See the GNU Make documentation for complete details of the syntax.
This method gives you the ultimate responsibility. The only requirement is that a library called $NAME be created by the Makefile.
The makefile is passed the following variables
the main Cactus directory
the configuration directory
the directory in which the source files can be found
the directory containing the configuration files
the thorn name
the scratch directory where Fortran module files should end up if they need to be seen by other thorns.
the name of the library to be built
and has a working directory of <config>/build/<thorn_name> .
CPP: The C preprocessor which is used to preprocess C and C++ source code, and to determine the C and C++ make dependencies
FPP: The C preprocessor which is used to preprocess Fortran source code
CPPFLAGS: Flags which are passed to CPP, to CC, and to CXX
FPPFLAGS: Flags which are passed to FPP
CC: The C compiler
CXX: The C++ compiler
CUCC: The CUDA compiler
F90: The Fortran compiler
F77: Same as F90
CFLAGS: Flags which are passed to CC
CXXFLAGS: Flags which are passed to CXX
CUCCFLAGS: Flags which are passed to CUDA
F90FLAGS: Flags which are passed to F90
F77FLAGS: Same as F90FLAGS
LD: The binder. This should not be directly ld, but should be a compiler driver such as C++. Often, LD is the same as CXX
LDFLAGS: Flags which are passed to LD
Note that there are no makefile variables to specify an OpenCL compiler or its flags. OpenCL is implemented as a library, and code is compiled at run time via library functions to which the source code is passed as a string. OpenCL source code (files with the extension .cl) are thus not compiled when a Cactus configuration is built. Instead, the content of .cl files is converted into a string and placed into the executable. These strings have the type char const * in C, and can be accessed at run time under a (globally visible) name OpenCL_source_THORN_FILE, where THORN and FILE and are the thorn name and file name, respectively.
A grid variable is a Cactus program variable passed among thorns, (or routines belonging to the same thorn interface), by way of calls to the flesh. They are the only variables known to Cactus. Such variables represent values of functions on the computational grid, and are, therefore, often called grid functions.
In the Cactus context, grid variables are often referred to simply as variables.
Cactus variables are used instead of local variables for a number of reasons:
Cactus variables can be made visible to other thorns, allowing thorns to communicate and share data.
Cactus variables can be distributed and communicated among processors, allowing parallel computation.
A database of Cactus variables, and their attributes, is held by the flesh, and this information is used by thorns, for example, for obtaining a list of variables for checkpointing.
Many Cactus APIs and tools can only be used with Cactus variables.
Cactus provides features for error checking based on Cactus variables and their attributes.
Cactus variables are collected into groups. All variables in a group are of the same data type, and have the same attributes. Most Cactus operations act on a group as a whole. A group must be declared in its thorn’s interface.ccl file.
The specification for a group declaration (fully described in Appendix D2.2) is,
Currently, the names of groups and variables must be distinct.
Cactus supports integer, real, complex and character variable types, in various different sizes. (Sizes in the following refer to the number of bytes occupied by the a variable of the type).
CCTK_INT, CCTK_INT1, CCTK_INT2, CCTK_INT4, CCTK_INT8. (CCTK_INT defaults to being CCTK_INT4).
CCTK_REAL, CCTK_REAL4, CCTK_REAL8, CCTK_REAL16. (CCTK_REAL defaults to being CCTK_REAL8).
CCTK_COMPLEX, CCTK_COMPLEX8, CCTK_COMPLEX16, CCTK_COMPLEX32. (CCTK_COMPLEX defaults to being CCTK_COMPLEX16).
This is a 1 byte data type.
Normally a thorn should use the default types—CCTK_INT, CCTK_REAL, CCTK_COMPLEX—rather than explicitly setting the size, as this gives maximum portability. Also, the defaults can be changed at configuration time (see Section B2.1.1), and this allows people to compile the code with different precisions to test for roundoff effects, or to run more quickly with a lower accuracy.
Groups can be either scalars, grid functions (GFs), or grid arrays. Different attributes are relevant for the different group types.
This is just a single number, e.g. the total energy of some field. These variables aren’t communicated between processors—what would be the result of such communication?
This is the most common group type. A GF is an array with a specific size, set at run time in the parameter file, which is distributed across processors. All GFs have the same size, and the same number of ghostzones. Groups of GFs can also specify a dimension, and number of timelevels.
This is a more general form of the GF. Each group of arrays can have a distinct size and number of ghostzones, in addition to dimension and number of timelevels. The drawback of using an array over a GF is that a lot of data about the array can only be determined by function calls, rather than the quicker methods available for GFs.
These are best introduced by an example using finite differencing. Consider the 1-D wave equation \begin {equation} \frac {\partial ^2 \phi }{\partial t^2} = \frac {\partial ^2 \phi }{\partial x^2} \end {equation} To solve this by partial differences, one discretises the derivatives to get an equation relating the solution at different times. There are many ways to do this, one of which produces the following difference equation \begin {equation} \label {equation:difference} \phi (t+\Delta t,x) -2\phi (t,x) +\phi (t-\Delta t,x) = \frac {\Delta t^2}{\Delta x^2} \lbrace {\phi (t,x+\Delta x) -2\phi (t,x) +\phi (t,x-\Delta x)}\rbrace \end {equation} which relates the three timelevels \(t+\Delta t\), \(t\), and \(t-\Delta t\).
Obviously, the code could just use three variables, one for each timelevel. This turns out, however, to be inefficient, because as soon as the time is incremented to \(t+\Delta t\), it would be necessary to copy data from the \(t\) variable to the \(t-\Delta t\) variable and from the \(t+\Delta t\) variable to the \(t\) variable.
To remove this extraneous copy, Cactus allows you to specify the number of timelevels used by your numerical scheme. It then generates variables with the base name (e.g. phi) suffixed by a qualifier for which timelevel is being referred to—no suffix for the next timelevel, and _p for each previous timelevel.
The timelevels are rotated (by the driver thorn) at the start of each evolution step, that is:
initial poststep analysis loop: rotate timelevels t = t + dt it = it + 1 prestep evolve poststep analysis
Timelevel rotation means that, for example, phi_p now holds the values of the former phi, and phi_p_p the values of the former phi_p, etc. Note that after rotation, phi is undefined, and its values should not be used until they have been updated.
All timelevels, except the current level, should be considered read-only during evolution, that is, their values should not be changed by thorns. The exception to this rule is for function initialisation, when the values at the previous timelevels do need to be explicitly filled out.
A Cactus grid function or array has a size set at runtime by parameters. This size can either be the global size of the array across all processors (DISTRIB=DEFAULT), or, if DISTRIB=CONSTANT, the specified size on each processor. If the size is split across processors, the driver thorn is responsible for assigning the size on each processor.
Cactus is based upon a distributed computing paradigm. That is, the problem domain is split into blocks, each of which is assigned to a processor. For hyperbolic and parabolic problems the blocks only need to communicate at the edges.
To illustrate this, take the example of the wave equation again. Equation C1.2 describes a possible time-evolution scheme. On examination, you can see that to generate the data at the point (\(t+\Delta t\), \(x\)) we need data from the four points (\(t\), \(x\)), (\(t-\Delta t\), \(x\)), (\(t\), \(x+\Delta x\)), and (\(t\), \(x-\Delta x\)) only. Ignoring the points at \(x\), which are obviously always available on a given processor, you can see that the algorithm requires a point on either side of the point \(x\), i.e. this algorithm has stencil size 1. Similarly algorithms requiring two points on either side have stencil size 2, etc.
Now, if you evolve the above scheme, it becomes apparent that at each iteration the number of grid points you can evolve decreases by one at each edge (see Figure C1.1).
At the outer boundary of the physical domain, the data for the boundary point can be generated by the boundary conditions, however, at internal boundaries, the data has to be copied from the adjacent processor. It would be inefficient to copy each point individually, so instead, a number of ghostzones are created at the internal boundaries. A ghostzone consists of a copy of the whole plane (in 3D, line in 2D, point in 1D) of the data from the adjacent processor. That is, the array on each processor is augmented with copies of points from the adjacent processors, thus allowing the algorithm to proceed on the points owned by this processor without having to worry about copying data. Once the data has been evolved one step, the data in the ghostzones can be exchanged (or synchronised) between processors in one fell swoop before the next evolution step. (See Figure C1.2.) Note that you should have at least as many ghostzones as your stencil size requires.
The flesh holds a database with information related to grid variables, and provides a set of querying APIs.
Fundamental information about grid functions (e.g. local grid size and location, number of ghostzones) is passed through the argument list of scheduled routines (see Section C1.6.2.0). To obtain similar information from non-scheduled routines, or for general grid variables, a set of functions are provided, the last two letters of which specify whether the information is requested using a group name (GN) or index (GI), or a variable name (VN) or index (VI).
An array of integers with the local grid size on this processor.
An array of integers with the global grid size.
An array of integers which indicate whether the boundaries are internal boundaries (e.g. between processors), or physical boundaries. A value of 1 indicates a physical (outer) boundary at the edge of the computational grid, and 0 indicates an internal boundary.
An array of integers with the number of ghostzones used in each direction.
An array of integers containing the lowest index (in each direction) of the local grid, as seen on the global grid. Note that these indices start from zero, so you need to add one when using them in Fortran thorns.
An array of integers containing the largest index (in each direction) of the local grid, as seen on the global grid. Note that these indices start from zero, so you need to add one when using them in Fortran thorns.
Parameters are the means by which the user specifies the runtime behaviour of the code. Each parameter has a data type and a name, as well as a range of allowed values and a default value. These are declared in the thorn’s param.ccl file.
The thorn determines which parameters can be used in other thorns by specifying a scope for the thorn, as explained in Section C1.4.2.
The user may specify initial values for parameters in the parameter file (see Section B3.2); the flesh validates these values against the parameters’ allowed ranges. Otherwise, the initial value of the parameter is taken to be its default. Once validated, parameter values are fixed, and cannot be changed, unless the parameter is specified to be steerable (see C1.4.3). For a detailed discussion of the param.ccl syntax, see Appendix D2.3.
The full specification for a parameter declaration is
You can obtain lists of the parameters associated with each thorn using the Cactus command line options -o and -O (Section B3.1).
Parameters can be of these types:
Can take any integral value
Can take any floating point value
Can have a value consisting of one of a choice of strings
Can be true or false (1, t, true, or 0, f, false)
Can have any string value
Each parameter can be validated against a set of allowed ranges, each of which has a description associated with it. The nature of the range is determined by the type of parameter, as follows:
The range specification is of the form
where lower and upper specify the lower and upper allowed range, and stride allows numbers to be be missed out, e.g.
1:21:2
means the value must be an odd number between one and twenty-one (inclusive).
A missing end of range (or a ‘*’) indicates negative or positive
Note that if stride is specified, then upper must be specified, or ‘*’ (i.e. the specifier ‘1::2’ is not legal)
infinity, and the default stride is one. A ‘(’ (or ‘)’) before (or after) the lower (or upper) range specifies an open endpoint.
Note that ’*’ is not allowed for the lower bound.
The range specification is of the form
The numbers written in a param.ccl file are interpreted as C code. To express a number in ‘scientific notation’, use, e.g. ‘1e-10’, which is a double precision constant in C. (If the floating precision of the variable to which it is assigned is not double, then C will typecast appropriately. If you really want to specify a single precision floating constant, or a long double constant, append the number with f or l respectively.)
The range specification consists of a string, which will be matched in a case insensitive manner.
There is no range specification for this type of parameter.
The range is a POSIX regular expression. On some machines you may be able to use extended regular expressions, but this is not guaranteed to be portable.
Parameters can be GLOBAL, RESTRICTED, or PRIVATE. Global parameters are visible to all thorns. Restricted parameters are visible to any thorn which chooses to USE or EXTEND it. A private parameter is only visible to the thorn which declares it. The default scope is PRIVATE.
A parameter can be changed dynamically if it is specified to be steerable (see Section D2.3.2). It can then be changed by a call to the flesh function CCTK_ParameterSet (see the Reference Guide for a description of this function).
Cactus contains a rule-based scheduling system, which determines which routines, from which thorns are run in which order. The scheduler determines if the specifications are inconsistent, but does allow the user to schedule a routine with respect to another routine which may not exist. For a detailed discussion of the schedule.ccl syntax see Appendix D2.4.
A usual simple specification for a schedule declaration is
The full specification for a schedule declaration is
This full schedule specification consists of a mandatory part, a set of options, and the main body limited by braces, referred to as the schedule block.
Each schedule item is scheduled either AT a particular scheduling bin, or IN a schedule group.
These are the main times at which scheduled functions are run, from fixed points in the flesh and driver thorn (schedule bins can easily be traversed from any thorn, although this is not usual). When a schedule bin is traversed, all the functions scheduled in that particular are called, in the manner described in Section C1.5.5 and respecting the requested ordering of functions(Section C1.5.3). In the absence of any ordering, functions in a particular schedule bin will be called in an undetermined order.
The schedule bins are described in Section C1.2.3.0. Note that the preceding CCTK_ is optional for the use of the bin names in the schedule.ccl file.
If the optional GROUP specifier is used, the item is a schedule group rather than a normal function. Schedule groups are effectively new, user-defined, schedule bins. Functions or groups may be scheduled IN these, in the same way as they are scheduled AT the main schedule bins. (That is, groups may be nested.)
The options define various characteristics of the schedule item.
This assigns a new name to a function for scheduling purposes. This is used, for instance, to allow a thorn to schedule something before or after a routine from another implementation; two thorns providing this implementation can schedule a routine AS the same thing, thus allowing other thorns to operate independently of which one is active.
This specifies a CCTK_INT grid scalar which is used to control the execution of this item. As long as the grid scalar has a nonzero value, the schedule item will be executed repeatedly. This allows dynamic behaviour with scheduling.
This specifies a CCTK_INT grid scalar which is used to control the execution of this item. If the grid scalar has a nonzero value, the schedule item will be executed, otherwise the item will be ignored. This allows dynamic behaviour with scheduling.
If both an IF and a WHILE clause are present, then the schedule is executed according to the following pseudocode:
IF condition
WHILE condition
SCHEDULE item
END WHILE
END IF
These specify either
a function or group before or after which this item will be scheduled, or
a list of functions and/or groups; this item will be scheduled (once) before any of them or after all of them respectively.
Note that a single schedule item may have multiple BEFORE and/or AFTER options; the scheduler will honor all of these (or abort with a fatal error). For example,
Note that the set of all BEFORE/AFTER options in all active schedule blocks of all active thorns, must specify a (directed) graph with no cycles; if there are any cycles, then the scheduler will abort with a fatal error.
The schedule block specifies further details of the scheduled function or group.
This specifies the language of the routine. Currently this is either C or Fortran. C++ routines should be defined as extern "C" and registered as LANG: C.
The STORAGE keyword specifies groups for which memory should be allocated for the duration of the routine or schedule group. The storage status reverts to its previous status after completion of the routine or schedule group. Each group must specify how many timelevels to activate storage for, from 1 up to the maximum number for the group as specified in the defining interface.ccl file. If the maximum is 1 (the default) this number may be omitted. Alternatively timelevels can be the name of a parameter accessible to the thorn. The parameter name is the same as used in C routines of the thorn, fully qualified parameter names of the form thorn::parameter are not allowed. In this case 0 (zero) timelevels can be requested, which is equivalent to the STORAGE statement being absent.
This is only used for items scheduled at timebin CCTK_ANALYSIS. The item will only be executed if output is due for at least one variable in one of the listed groups. (The item will also be called if there is no group listed.)
On exit from this item, the ghost zones of the listed groups will be exchanged.
This is for miscellaneous options. The list of accepted options is given in Appendix D2.4.2.0.
For each scheduled function called, the flesh performs a variety of jobs at entry and exit.
On entry to a scheduled routine, if the routine is being called at the CCTK_ANALYSIS timebin first, a check is made to see if the routine should actually be called on this timestep. For this, all grid variables in the trigger groups for the routine are checked with all registered output methods to determine if it is time to output any triggers. The routine will only be called if at least one is due to be output. Note that once a grid variable has been analyzed, it gets marked as such, and will not be analyzed again during this iteration. (Note that a routine without any trigger groups will also be called.) Thus, if more than one analysis routine should be triggered on the same trigger variable(s), they must be scheduled in a single group. Routines from all timebins, other than ANALYSIS, are always called.
Next, storage is assigned for any required variables, remembering the original state of storage.
The routine is then called, and on exit, any required grid variables are first synchronised. Following synchronization, any required output methods are called for the triggers. Finally, the storage of grid variables is returned to the original state.
When you start writing a new thorn, the first decision to make is which programming language to use. The source code in Cactus thorns can be written in any mixture of C, C++, CUDA, or Fortran. The following points should be considered when choosing a language to work in:
All functions designed for application thorn writers are available in all languages, however, some interfaces for infrastructure thorn writing are only available from C or C++.
Whatever language you choose, if you want your thorn to be portable, and compile and run on multiple platforms, stick to the standards and don’t use machine dependent extensions.
The flesh provides for thorns:
Driver (parallelisation) utilities
I/O utilities
Coordinates utilities
Reduction utilities
Interpolation utilities
Information utilities
Any source file using Cactus infrastructure should include the header file cctk.h using the line
#include "cctk.h"
(Fortran programmers should not be put off by this being a C style header file—most Cactus files are run through a C preprocessor before compilation.)
Variables Any routine using Cactus argument lists (for example, all routines called from the scheduler at time bins between CCTK_STARTUP and CCTK_SHUTDOWN) should include at the top of the file the header
#include "cctk_Arguments.h"
A Cactus macro CCTK_ARGUMENTS is defined for each thorn to contain:
General information about the grid hierarchy, for example, the number of grid points used. See Section C1.6.2.0 for a complete list.
All the grid variables defined in the thorn’s interface.ccl
All the grid variables required from other thorns as requested by the inherits and friend lines in the interface.ccl
These variables must be declared at the start of the routine using the macro DECLARE_CCTK_ARGUMENTS. Alternatively, they can be declared with DECLARE_CCTK_ARGUMENTS_CHECKED(<function name>), where <function name> is the name of the function as declared in schedule.ccl. The function-name specific version of the macro will declare only those variables identified by READS/WRITES directives in schedule.ccl, using const for the C/C++ variables and intent(in) for the Fortran variables. (Note that, for technical reasons, in Fortran variables declared in DECLARE_CCTK_ARGUMENTS but not in the READS/WRITES directives are actually declared as intent(in), type(cctki_inaccessible_grid_variable), and are thus unusable.)
To pass the arguments to another routine in the same thorn use the macro CCTK_PASS_FTOF in the calling routine, and again the macro CCTK_ARGUMENTS in the receiving routine.
Note that you cannot use Cactus argument lists in routines scheduled at the CCTK_STARTUP and CCTK_SHUTDOWN time bins, because at this time no grid hierarchy exists.
Parameters All parameters defined in a thorn’s param.ccl and all global parameters, appear as local variables of the corresponding CCTK data type in Fortran source code, i.e. Booleans and Integers appear as CCTK_INT types (with nonzero/zero values for boolean yes/no), Reals as CCTK_REAL, and Keywords and String parameters as CCTK_STRING (see also note below). These variables are read only, and changes should not be made to them. The effect of changing a parameter is undefined (at best).
Any routine using Cactus parameters should include at the top of the file the header
#include "cctk_Parameters.h"
The parameters should be declared at the start of the routine using them with the macro DECLARE_CCTK_PARAMETERS.
In Fortran, special care should be taken with string valued parameters. These parameters are passed as C pointers, and can not be treated as normal Fortran strings. To compare a string valued parameter and Fortran string, use the macro CCTK_EQUALS() or the function CCTK_Equals() (see the reference manual for a description of the CCTK_ functions). To print the value of a string valued parameter to screen, use the subroutine CCTK_PrintString(). A further function CCTK_FortranString provides a mechanism for converting a string parameter to a Fortran string. For example, if operator is a Cactus string parameter holding the name of a reduction operator whose handle you need to find, you cannot pass it directly into the subroutine CCTK_LocalArrayReductionHandle, which is expecting a Fortran string. Instead, the following is needed:
character*200 fortran_operator CCTK_INT fortran_operator_len integer handle call CCTK_FortranString(fortran_operator_len,operator,fortran_operator) call CCTK_LocalArrayReductionHandle(handle,fortran_operator(1:fortran_operator_len))
Fortran Example
The Fortran routine, MyFRoutine, is scheduled in the schedule.ccl file, doesn’t use Cactus parameters, and
calls another routine, in the same thorn, MyNewRoutine, which does use parameters. This routine needs
to be passed an integer flag as well as the standard Cactus variables. The source file should look
like
#include "cctk.h" #include "cctk_Arguments.h" #include "cctk_Parameters.h" subroutine MyFRoutine(CCTK_ARGUMENTS) c I’m very cautious, so I want to declare all variables implicit none DECLARE_CCTK_ARGUMENTS_CHECKED(MyFRoutine) c Note: It is also possible to use c DECLARE_CCTK_ARGUMENTS c However, this latter form will declare all variables c available to the thorn and not simply those listed c in the READS/WRITES clauses of the schedule.ccl declaration. c c Note: It is also possible to use all caps for the function c name when writing in Fortran. Thus, the following also works: c c DECLARE_CCTK_ARGUMENTS_CHECKED(MYFROUTINE) integer flag flag = 1 call MyNewRoutine(CCTK_PASS_FTOF,flag) return end subroutine MyNewRoutine(CCTK_ARGUMENTS,flag) implicit none DECLARE_CCTK_ARGUMENTS_CHECKED(MyNewRoutine) DECLARE_CCTK_PARAMETERS integer flag c Main code goes here return end
Cactus Fortran Functions Cactus Fortran functions, for example, CCTK_MyProc and CCTK_Equals, can all be declared by adding the statement
#include "cctk_Functions.h"
near the top of the file, and adding the declaration
DECLARE_CCTK_FUNCTIONS
to a module or a subroutine after the implicit none statement, but before any executable code.
Fortran Modules Fortran modules should be placed into source files that have the same name as the module, followed by the corresponding file name suffix. A module metric should thus be placed, e.g. into a file metric.F90. This convention allows the Cactus build system to automatically deduce the compile time dependencies.
If you do not follow this convention, then you have to include the modules into the thorn’s make.code.deps file (Section C1.2.5.0) to ensure they are compiled before the routines which use them. This is especially important for parallel building. For example, if a routine in MyRoutine.F90 uses a module in MyModule.F90, then add the line:
MyRoutine.F90.o: MyModule.F90.o
The MOD function The intrinsic function MOD in Fortran takes two integer arguments, which should both be of the same type. This means that it may be necessary to cast the arguments to, e.g. INT for some architectures. This can occur in particular when a CCTK_INT parameter and the Cactus variable cctk_iteration (which is declared to be INTEGER) are used, in which case the correct code is
MOD(cctk_iteration,INT(MyParameter))
Any source file using Cactus infrastructure should include the header file cctk.h using the line
#include "cctk.h"
Variables Any routine using Cactus argument lists (for example, all routines called from the scheduler at time bins between CCTK_STARTUP and CCTK_SHUTDOWN), should include at the top of the file the header
#include "cctk_Arguments.h"
A Cactus macro CCTK_ARGUMENTS is defined for each thorn to contain
General information about the grid hierarchy, for example, the number of grid points on the processor. See Section C1.6.2.0 for a complete list.
All the grid variables defined in the thorn’s interface.ccl
All the grid variables required from other thorns as requested by the inherits and friend lines in the interface.ccl
These variables must be declared at the start of the routine using the macro DECLARE_CCTK_ARGUMENTS. This macro should always be the first line of the routine.
To pass the arguments to another routine in the same thorn, use the macro CCTK_PASS_CTOC in the calling routine, and again the macro CCTK_ARGUMENTS in the receiving routine.
Note that you cannot use Cactus argument lists in routines scheduled at the CCTK_STARTUP and CCTK_SHUTDOWN time bins, because at this time no grid hierarchy exists.
Parameters All parameters defined in a thorn’s param.ccl and all global parameters, appear as local variables of the corresponding CCTK data type in C source code, i.e. Integers and Booleans appear as CCTK_INT types (with nonzero/zero values for boolean yes/no), Reals as CCTK_REAL, and Keywords and String parameters as CCTK_STRING. These variables are read only, and changes should not be made to them. The effect of changing a parameter is undefined (at best).
Any routine using Cactus parameters should include at the top of the file the header
#include "cctk_Parameters.h"
The parameters should be declared as the last statement in the declaration part of the routine using them with the macro DECLARE_CCTK_PARAMETERS.
Example
The C routine MyCRoutine is scheduled in the schedule.ccl file, and uses Cactus parameters. The source file
should look like
#include "cctk.h"
#include "cctk_Arguments.h"
#include "cctk_Parameters.h"
void MyCRoutine(CCTK_ARGUMENTS)
{
DECLARE_CCTK_ARGUMENTS_CHECKED(MyCRoutine)
DECLARE_CCTK_PARAMETERS
/* Here goes your code */
}
Complex variables Cactus supports complex grid variables of type CCTK_COMPLEX which are realized through the types complex, std::complex and COMPLEX in C, C++ and Fortran respectively. Complex number support is available in C in the C99 language standard which Cactus requires.
There is a known incompatibility when returning complex numbers from C and Fortran functions to C++ callers on some architectures. Access to variables through pointers and in arrays is not affected. A workaround is not to return values but instead pass in a pointer to a local variable to hold the return value.
Specifically for C Programmers Grid functions are held in memory as 1-dimensional C arrays. These are laid out in memory as in Fortran. This means that the first index should be incremented through most rapidly. This is illustrated in the example below.
Cactus provides macros to find the 1-dimensional index which is needed from the multidimensional indices which are usually used. There is a macro for each dimension of grid function. Below is an artificial example to demonstrate this using the 3D macro CCTK_GFINDEX3D:
for (k=0; k<cctk_lsh[2]; k++)
{
for (j=0; j<cctk_lsh[1]; j++)
{
for (i=0; i<cctk_lsh[0]; i++)
{
int const ind3d = CCTK_GFINDEX3D(cctkGH,i,j,k);
rho[ind3d] = exp(-pow(r[ind3d],2));
}
}
}
Here, CCTK_GFINDEX3D(cctkGH,i,j,k) expands to
((i) + cctkGH->cctk_lsh[0]*((j)+cctkGH->cctk_lsh[1]*(k)))
Note: In Fortran, grid functions are accessed as Fortran arrays, i.e. simply as rho(i,j,k).
To access vector grid functions (vector grid functions are a “vector” of grid functions; see section D2.2.4), one also needs to specify the vector index. This is best done via the 3D macro CCTK_VECTGFINDEX3D:
for (k=0; k<cctk_lsh[2]; k++)
{
for (j=0; j<cctk_lsh[1]; j++)
{
for (i=0; i<cctk_lsh[0]; i++)
{
/* vector indices are 0, 1, 2 */
vel[CCTK_VECTGFINDEX3D(cctkGH,i,j,k,0)] = 1.0;
vel[CCTK_VECTGFINDEX3D(cctkGH,i,j,k,1)] = 0.0;
vel[CCTK_VECTGFINDEX3D(cctkGH,i,j,k,2)] = 0.0;
}
}
}
The Cactus variables which are passed through the macro CCTK_ARGUMENTS are
A C pointer identifying the grid hierarchy.
An integer with the number of dimensions used for this grid hierarchy.
An array of cctk_dim integers with the local grid size on this processor.
An array of cctk_dim integers with the allocated size of the array. This may be larger than the local size; the additional points may not be used.
An array of cctk_dim integers with the global grid size.
The current iteration number.
A CCTK_REAL with the timestep.
A CCTK_REAL with the current time.
An array of cctk_dim CCTK_REALs with the grid spacing in each direction.
An array of cctk_dim integers with the number of ghostzones used in each direction.
An array of cctk_dim CCTK_REALs with the spatial coordinates of the global origin of the grid.
The following variables describe the location of the local grid (e.g. the grid treated on a given processor) within the global grid.
The current refinement level, counting from \(0\) for the base level.
An array of cctk_dim integers containing the lowest index (in each direction) of the local grid, as seen on the global grid. Note that these indices start from zero, so you need to add one when using them in Fortran thorns.
An array of cctk_dim integers containing the largest index (in each direction) of the local grid, as seen on the global grid. Note that these indices start from zero, so you need to add one when using them in Fortran thorns.
An array of 2\(*\)cctk_dim integers (in the order \([\mbox {dim}_0^{\mbox {min}}, \mbox {dim}_0^{\mbox {max}}, \mbox {dim}_1^{\mbox {min}}, \mbox {dim}_1^{\mbox {max}}, \ldots ]\)), which indicate whether the boundaries are internal boundaries (e.g. between processors), or physical boundaries. A value of 1 indicates a physical (outer) boundary at the edge of the computational grid, and 0 indicates an internal boundary.
The following variable is needed for grid refinement methods
An array of cctk_dim integer factors by which the local grid is refined in the corresponding direction with respect to the base grid.
An integer number of the refinement level, with the base level is level \(0\) and larger number indicating refined levels.
and cctk_levoffdenom Two arrays of cctk_dim integers describing the distance by which the local grid is offset with respect to the base grid, measured in local grid spacings. The distance in direction dir is given by 1.0 * cctk_levoff[dir] / cctk_levoffdenom[dir].
The integer factor by which the time step size is reduced with respect to the base grid.
The following variables are used for identifying convergence levels.
The convergence level of this grid hierarchy. The base level is \(0\), and every level above that is coarsened by a factor of cctk_convfac.
The factor between convergence levels. The relation between the resolutions of different convergence levels is \(\Delta x_L = \Delta x_0 \cdot F^L\), where \(L\) is the convergence level and \(F\) is the convergence factor. The convergence factor defaults to \(2\).
The following variables are used for identifying the coordinate patch in a multipatch/multiblock simulation.
An integer with the multipatch patch number on this processor.
An integer with the total number of multipatch patches on all processors.
The variables cctk_delta_space, cctk_delta_time, and cctk_origin_space denote the grid spacings, time step size, and spatial origin on the base grid. If you are using a grid refinement method, you need to calculate these quantities on the grid you are on. There are Cactus macros provided for this, with the syntax CCTK_DELTA_SPACE(dir), CCTK_ORIGIN_SPACE(dir), and CCTK_DELTA_TIME for both C and Fortran. It is recommended that these macros are always used to provide the grid spacings, time step sizes, and spatial origins in your thorns. In doing so, you incorporate the effects of cctk_levfac, cctk_levoff, cctk_levoffdenom, and cctk_timefac, so that you do not explicitly have to take them into account.
Putting the above information together, Figure C1.3 shows two different ways to compute the global Cactus \(xyz\)
coordinates of the current grid point. Because the “alternate calculation” (the one using Grid::x, Grid::y, and
Grid::z) gives the true global \(xyz\) coordinates even in a multipatch/multiblock context, this is generally the
preferred form for general use.
#include <stddef.h> /* defines size_t */
#include "cctk.h"
void MyThorn_MyFunction(CCTK_ARGUMENTS)
{
int i,j,k;
for (k = 0 ; k < cctk_lsh[2] ; ++k)
{
for (j = 0 ; j < cctk_lsh[1] ; ++j)
{
for (i = 0 ; i < cctk_lsh[0] ; ++i)
{
const size_t posn = CCTK_GFINDEX3D(cctkGH, i,j,k);
/* calculate the global xyz coordinates of the (i,j,k) grid point */
/* (in a multipatch/multiblock context, this gives the per-patch coordinates) */
const CCTK_REAL xcoord = CCTK_ORIGIN_SPACE(0) + (cctk_lbnd[0] + i)*CCTK_DELTA_SPACE(0);
const CCTK_REAL ycoord = CCTK_ORIGIN_SPACE(1) + (cctk_lbnd[1] + j)*CCTK_DELTA_SPACE(1);
const CCTK_REAL zcoord = CCTK_ORIGIN_SPACE(2) + (cctk_lbnd[2] + k)*CCTK_DELTA_SPACE(2);
/* an alternate calculation, which requires that this thorn inherit from Grid */
/* (in a multipatch/multiblock context, this gives the true global xyz coordinates) */
const CCTK_REAL xxcoord = /* Grid:: */ x[posn];
const CCTK_REAL yycoord = /* Grid:: */ y[posn];
const CCTK_REAL zzcoord = /* Grid:: */ z[posn];
}
}
}
}
To provide portability across platforms, the Cactus grid variables and parameters are defined and declared using Cactus data types. The most important of these data types are described below, for a full description see Section C1.9.8. These data types should be used to declare local variables where needed, and to declare Cactus grid variables or parameters that need declarations.
default size 4 bytes
default size 8 bytes
consists of two CCTK_REAL elements
Example
In the following example, MyScalar is a grid scalar which is declared in the interface.ccl as
CCTK_REAL.
subroutine InitialData(CCTK_ARGUMENTS) DECLARE_CCTK_ARGUMENTS CCTK_REAL local_var local_var = 1.0/3.0 MyScalar = local_var return end
Declaring local_var to have a non-Cactus data type, e.g. REAL*4, or using one of the other Cactus real data types described in Section C1.9.8, could give problems for different architectures or configurations.
The flesh itself does not actually set up grid variables. This is done by a driver thorn. To allow the distribution of a grid over a number of processors, the driver thorn must also provide the grid decomposition, and routines to enable parallelisation. The method used to provide this parallelisation (e.g. MPI, PVM) is not usually important for the thorn writer, since the driver thorn provides routines which are called by standard interfaces from the flesh. Here, we describe briefly the most important of these routines for the application thorn writer. A more detailed description of these interfaces with their arguments, is given in the Reference Manual. A complete description of the routines that a driver thorn must provide, will be provided in the Infrastructure Thorn Writers Guide (Part C2). The standard driver thorn is currently PUGH in the CactusPUGH package, which is a parallel unigrid driver.
Returns the number of processors being used
Returns the processor number (this starts at processor number zero)
Synchronises either a single group or a set of groups of grid arrays by exchanging the values held in each processor ghostzones, with the physical values of their neighbours (see the Reference Manual)
Waits for all processors to reach this point before proceeding
A grid function consists of a multi-dimensional array of grid points. These grid points fall into several types:
regular grid point, presumably evolved in time
inter-process boundary, containing copies of values owned by another process
outer boundary, presumably defined via a boundary condition
defined via a symmetry, e.g. a reflection symmetry or periodicity
Grid points in the edges and corners may combine several types. For example, a point in a corner may be a ghost point in the \(x\) direction, a physical boundary point in the \(y\) direction, and a symmetry point in the \(z\) direction.
The size of the physical boundary depends on the application. The number of ghost points is defined by the driver; the number of symmetry points is in principle defined by the thorn implementing the respective symmetry condition, but will in general be the same as the number of ghost points to avoid inconsistencies.
When iterating over grid points, one usually needs to know about the boundary sizes and boundary types present. Details about this is explained in thorn CactusBase/CoordBase.
The flesh provides a set of macros to iterate over particular types of grid points:
Loop over all grid points
Loop over all interior grid points
Loop over all physical boundary points
Loop over all “interior” physical boundary points, i.e. over all those physical boundary points that are not also ghost or symmetry points
As described above, points on edges and corners can have several boundary types at once, e.g. can be both a physical and a symmetry point. LOOP_BND and LOOP_INTBND treat these different: LOOP_BND loops over all points that are physical boundaries (independent of whether they also are symmetry or ghost boundaries), while LOOP_INTBND loops over those points that are only physical boundaries (and excludes any points that belongs to a symmetry or ghost boundary). LOOP_BND does not require applying a symmetry condition or synchronisation afterwards (but does not allow taking tangential derivatives); LOOP_INTBND allows taking tangential derivatives (but requires applying symmetry boundaries and synchronising afterwards).
In 3 dimensions, these macros should be called as follows:
CCTK_LOOP3_ALL(name, cctkGH, i,j,k) {
... body of the loop
} CCTK_ENDLOOP3_ALL(name);
CCTK_LOOP3_INT(name, cctkGH, i,j,k) {
... body of the loop
} CCTK_ENDLOOP3_INT(name);
CCTK_LOOP3_BND(name, cctkGH, i,j,k, ni,nj,nk) {
... body of the loop
} CCTK_ENDLOOP3_BND(name);
CCTK_LOOP3_INTBND(name, cctkGH, i,j,k, ni,nj,nk) {
... body of the loop
} CCTK_ENDLOOP3_INTBND(name);
and similarly for 2 dimensions and 1 dimension.
In all cases, name should be replaced by a unique name for the loop. i, j, and k are names of variables that will be declared and defined by these macros, containing the index of the current grid point. Similarly ni, nj, and nk are names of variables describing the (outwards pointing) normal direction to the boundary as well as the distance to the boundary.
OpenMP All CCTK_LOOP macros include support for OpenMP based multi-threading when called inside of an OpenMP parallel section. They do no themselves create such a parallel section and therefore should be preceded by a #pragma omp parallel:
#pragma omp parallel
CCTK_LOOP3_ALL(name, cctkGH, i,j,k) {
... body of the loop
} CCTK_ENDLOOP3_ALL(name);
and similar for CCTK_LOOP3_INT, CCTK_LOOP3_BND, and CCTK_LOOP3_INTBND.
The flesh provides utility routines for registering and querying coordinate information. The flesh does not provide any coordinates itself, these must be supplied by a thorn. Thorns are not required to register coordinates to the flesh, but registering coordinates provides a means for infrastructure thorns to make use of coordinate information.
Coordinates are grouped into coordinate systems, which have a specified dimension. Any number of coordinate systems can be registered with the flesh, and a coordinate system must be registered before any coordinates can be registered, since they must be associated with their corresponding system. Coordinates can be registered, with any chosen name, with an existing coordinate system, along with their direction or index in the coordinate system. Optionally, the coordinate can also be associated with a given grid variable. A separate call can register the global range for a coordinate on a given grid hierarchy.
Following conventions for coordinate system and coordinate names, provides a means for other thorns to use the physical properties of coordinate systems, without being tied to a particular thorn.
A registered coordinate system can be referred to by either its name or an associated integer known as a handle. Passing a handle instead of the name string may be necessary for calling C routines from Fortran.
The APIs described in this section are deprecated, and will probably be phased out fairly soon. New code should use the APIs provided by the CoordBase thorn instead (this lives in the CactusBase arrangement).
Coordinate systems and their properties can be registered at any time with the flesh. The registration utilities for thorns providing coordinates are:
Assigns a coordinate system with a chosen name and dimension. For example, a 3-dimensional Cartesian coordinate system could be registered with the name cart3d using the call from C
int ierr;
int dim=3;
ierr = CCTK_CoordRegisterSystem(dim,"cart3d");
Defines a coordinate in a given coordinate system, with a given direction and name, and optionally associates it to a grid variable. The directions of the coordinates range from 1 to the dimension of the coordinate system. For example, to register the grid variable grid::y3d to have the coordinate name y in the cart3d system
int ierr;
int dir=2;
ierr = CCTK_CoordRegisterData(dir,"grid::y3d","y","cart3d");
Assigns the global computational maximum and minimum for a coordinate on a grid hierarchy, that is in a cctkGH. At this time the maximum and minimum values have to be of type CCTK_REAL. For example, if the y coordinate for the cart3d system ranges between zero and one
CCTK_REAL lower=0;
CCTK_REAL upper=1;
int ierr;
ierr = CCTK_CoordRegisterRange(cctkGH, lower, upper, -1, "y", "cart3d");
Note that the API allows either the coordinate name or the direction to be used, so that the following is also valid
CCTK_REAL lower=0;
CCTK_REAL upper=1;
int ierr;
ierr = CCTK_CoordRegisterRange(cctkGH, lower, upper, 2, NULL, "cart3d");
Implementing such things as symmetry properties for a grid leads to the need to know the details of the physical section of a grid. Such information is typically needed by I/O thorns. The following call illustrates how to register the indices 3 and 25 as supplying the physical range of the y coordinate in the cart3d system
int loweri=3;
int upperi=25;
int ierr;
ierr = CCTK_CoordRegisterPhysIndex(cctkGH, loweri, upperi, -1, "y", "cart3d");
The APIs described in this section are deprecated, and will probably be phased out fairly soon. New code should use the APIs provided by the CoordBase thorn instead (this lives in the CactusBase arrangement).
The utilities for thorns using coordinates are:
Returns the number of coordinate systems registered with the flesh. For example,
int num;
num = CCTK_NumCoordSystems();
Provides the name of a registered coordinate system, given the integer handle (or index) for the system in the flesh’s coordinate data base. Note that the handle ranges between zero and the number of coordinate systems minus one: \(0 \le \mbox {handle} \le \mbox {\texttt {CCTK\_NumCoordSystems()}}-1\). It is important to remember that the handle given to a coordinate system depends on the order in which systems are registered, and can be different from one simulation to the next.
For example, to print the names of all registered coordinate systems:
for (i=0; i<CCTK_NumCoordSystems(); i++)
printf("%s ",CCTK_CoordSystemNName(i));
Provides the dimension of a coordinate system. For example, if the cart3d system was registered as having 3 dimensions, the variable dim below will now be set to 3,
int dim;
dim = CCTK_CoordSystemDim("cart3d");
Provides the integer handle for a given coordinate system name. The handle describes the index for the coordinate system in the flesh coordinate database, and its value will range between zero and the number of registered systems minus one. For example, the handle for the cart3d coordinate system can be found using
int handle;
handle = CCTK_CoordSystemHandle("cart3d");
The inverse to the previous function call. This provides the name for a given coordinate system handle. For example, to find the first coordinate system in the flesh database
int handle = 0;
const char *name = CCTK_CoordSystemName(handle);
Provides the grid variable index for a given coordinate. Note that it is not necessary for a registered coordinate to have an associated grid variable, and if no such grid variable is found, a negative integer will be returned. For example, to find the grid variable index associated with the y coordinate of the cart3d system, either of the two following calls could be made
int index;
index = CCTK_CoordIndex(2,NULL,"cart3d");
int index;
index = CCTK_CoordIndex(-1,"y","cart3d");
Provides the direction for a given coordinate. Directions are integers ranging from one to the number of dimensions for the coordinate system. For example, to return the direction of the y coordinate in the cart3d system
int dir;
dir = CCTK_CoordDir("y","cart3d");
The return of a negative integer indicates that the coordinate direction could not be found.
Provides the global range (that is, the minimum and maximum values across the complete grid) of a coordinate on a given grid hierarchy. The minimum and maximum values must be of type CCTK_REAL. The coordinate can be specified either by name or by its direction. Note that this call takes the addresses of the minimum and maximum values. For example, the range of the y coordinate of the cart3d coordinate system can be found using
CCTK_REAL lower, upper;
int ierr;
ierr = CCTK_CoordRange(cctkGH, &lower, &upper, -1, "y", "cart3d");
or alternatively, using the direction
CCTK_REAL lower, upper;
int ierr;
ierr = CCTK_CoordRange(cctkGH, &lower, &upper, 2, NULL, "cart3d");
Provides the local range of a coordinate on a processor for a given grid hierarchy. WARNING: This utility only works for regular cartesian grids. For example, the local processor range of the y coordinate of the cart3d coordinate system can be found using
CCTK_REAL lower, upper;
int ierr;
ierr = CCTK_CoordLocalRange(cctkGH, &lower, &upper, -1, "y", "cart3d");
or alternatively, using the direction
CCTK_REAL lower, upper;
int ierr;
ierr = CCTK_CoordLocalRange(cctkGH, &lower, &upper, 2, NULL, "cart3d");
For a given coordinate, provides the indices describing the physical range of the coordinate. A negative return value signifies that no such range was registered for the coordinate.
This index range provides a mechanism for describing grid points which should not be considered part of the simulation results (for example, grid points used for different boundary conditions). The physical range of the y coordinate of the cart3d system can be found using
int ilower, iupper;
int ierr;
ierr = CCTK_CoordRangePhysIndex(cctkGH,&ilower,&iupper, -1, "y", "cart3d");
or using the coordinate direction
int ilower, iupper;
int ierr;
ierr = CCTK_CoordRangePhysIndex(cctkGH,&ilower,&iupper, 2, NULL, "cart3d");
This call returns the name of the implementation which registered a coordinate system. Note that there is no guarantee that a thorn, which registered a coordinate system, is the same thorn which registers each of the coordinates in the system, although this should usually be the case.
To allow flexible I/O, the flesh itself does not provide any output routines, however it provides a mechanism for thorns to register different routines as I/O methods (see Chapter C2.7). Application thorns can interact with the different I/O methods through the following function calls:
CCTK_OutputGH (const cGH *GH)
This call loops over all registered I/O methods, calling the routine that each method has registered for OutputGH. The expected behaviour of any OutputGH routine is to loop over all GH variables, outputting them if the I/O method contains appropriate routines (that is, not all methods will supply routines to output all different types of variables), and if the method decides it is an appropriate time to output.
CCTK_OutputVar (const cGH *GH, const char *varname)
Outputs a variable varname looping over all registered I/O methods. varname may have an optional I/O option string appended. The output should take place if at all possible. If output goes into a file and the appropriate file exists, the data is appended, otherwise a new file is created.
CCTK_OutputVarAs (const cGH *GH, const char *varname, const char *alias)
Outputs a variable varname looping over all registered I/O methods. varname may have an optional I/O option string appended. The output should take place if at all possible. If output goes into a file and the appropriate file exists, the data is appended, otherwise a new file is created. Uses alias as the name of the variable for the purpose of constructing a filename.
CCTK_OutputVarByMethod (const cGH *GH, const char *varname, const char *methodname)
Outputs a variable varname using the I/O method methodname if it is registered. varname may have an optional I/O option string appended. The output should take place if at all possible. If output goes into a file and the appropriate file exists, the data is appended, otherwise a new file is created.
CCTK_OutputVarAsByMethod (const cGH *GH, const char *varname, const char
*methodname,
const char *alias)
Outputs a variable varname using the I/O method methodname if it is registered. varname may have an optional I/O option string appended. The output should take place if at all possible. If output goes into a file and the appropriate file exists, the data is appended, otherwise a new file is created. Uses alias as the name of the variable for the purpose of constructing a filename.
The flesh does not provide interpolation routines by itself. Instead, it offers a general function API to thorns, for the registration and invocation of interpolation operators.
There are two different flesh APIs for interpolation, depending on whether the data arrays are Cactus grid arrays or processor-local, programming language built-in arrays, and on what assumptions are made about the topology and spacing of the grid (these descriptions are for 3D, but the generalisations to other numbers of dimensions should be obvious):
Interpolates Cactus grid arrays, with the topology of the grid implicitly specified by a Cactus coordinate system.
This API doesn’t provide an interpolation functionality itself, it only takes care of the interprocessor communication necessary when interpolating distributed grid arrays, and invokes the CCTK_InterpLocalUniform() API on the each processor’s local component of the data.
Interpolates processor-local arrays with uniformly spaced data points, i.e. where the
coordinates \(xyz\) are related to the integer array subscripts ijk by linear functions
\(x = \mbox {\code {origin}}_x + i \, \mbox {\code {delta}}_x\)
\(y = \mbox {\code {origin}}_y + j \, \mbox {\code {delta}}_y\)
\(z = \mbox {\code {origin}}_z + k \, \mbox {\code {delta}}_z\)
where the caller specifies the origin and delta values.
The flesh provides an API to register local interpolation operators:
Register a CCTK_InterpLocalUniform() interpolation operator
This is described in detail in the Reference Manual.
Each local interpolation operator is registered under a character string name; at registration, the name is
mapped to a unique integer handle, which may be used to refer to the operator. CCTK_InterpHandle() is used
to get the handle corresponding to a given character string name.
A reduction operation can be defined as an operation on variables distributed across multiple processor resulting in a single number. Typical reduction operations are: sum, minimum/maximum value, and boolean operations. A typical application is, for example, finding the maximum reduction from processor local error estimates, therefore, making the previous processor local error known to all processors.
The exchange of information across processors needs the functionality of a communication layer, e.g. CactusPUGH/PUGH. For this reason, the reduction operation itself is not part of the flesh, instead, Cactus (again) provides a registration mechanism for thorns to register routines they provide as reduction operators. The different operators are identified by their name and/or a unique number, called a handle.
The registration mechanism gives the advantage of a common interface while hiding the individual communication calls in the layer.
In Cactus, reduction operators can be applied to grid functions, arrays and scalars, as well as to local arrays. Note that different implementations of reduction operators may be limited in the objects they can be applied to. There is a fundamental difference between the reduction operation on grid functions and quantities as arrays.
Currently the flesh supports the new and old reduction specification. The old APIs will be deprecated in the next beta cycle in favour of the new specification.
New Reduction Specification API documentation
In the new reduction specification, there are two different flesh APIs for reduction, depending on whether the data arrays are Cactus grid arrays or processor-local, programming language built-in arrays, and on what assumptions are made about the topology and spacing of the grid (these descriptions are for 3D, but the generalisations to other numbers of dimensions should be obvious):
Reduces Cactus grid arrays, with the topology of the grid implicitly specified by a Cactus coordinate system.
This API doesn’t provide a reduction functionality itself, it only takes care of the interprocessor communication necessary when reducing distributed grid arrays, and invokes the CCTK_ReduceLocalArrays() API on the each processor’s local component of the data.
Reduces processor-local arrays with various options including offsets, strides and masks.
The flesh provides an API to register local reduction operators:
Register a CCTK_ReduceLocalArrays() interpolation operator
This is described in detail in the Reference Manual.
Each local reduction operator is registered under a character string name; at registration, the name is mapped to
a unique integer handle, which may be used to refer to the operator. CCTK_LocalArrayReductionHandle() is
used to get the handle corresponding to a given character string name.
Old Reduction Specification API Documentation
Obtaining the reduction handle
Before calling the routine which performs the reduction operation, the handle, which identifies the operation, must be derived from its registered name.
int CCTK_ReductionHandle(const char *reduction_name); integer reduction_handle character*(*) reduction_name call CCTK_ReductionHandle(reduction_handle, reduction_name) int CCTK_ReductionArrayHandle(const char *reduction_name); integer reduction_handle character*(*) reduction_name call CCTK_ReductionArrayHandle(reduction_handle, reduction_name)
in Fortran, the name of the variable will contain the handle value after the call. In C, this value is the function value.
is the name under which the operator has been registered by the providing thorn. The only thorn in the standard Computational Toolkit release, which provides reduction operators, is CactusPUGH/PUGHReduce.
negative handle value indicates failure to identify the correct operator.
Get a integer handle corresponding to a given reduction operator. The operator is identified by the name it was registered with. (Note that although it would appear to be far more convenient to pass the name of the reduction operator directly to the following function call to CCTK_Reduce this causes problems with the translation of strings from Fortran to C with variable argument lists).
The general reduction interface. The main interfaces for reduction operations are quite powerful (and hence rather complicated). To ease the use of these main interfaces, wrappers designed for specific and more restricted use are described below. If uncertain, you should use these.
int CCTK_Reduce( const cGH *GH,
int proc,
int operation_handle,
int num_out_vals,
int type_out_vals,
void *out_vals,
int num_in_fields,
...);
call CCTK_Reduce( int returnvalue,
cctkGH,
int processor,
int operation_handle,
int num_out_vals,
int type_out_vals,
out_vals,
int num_in_fields,
... )
int CCTK_ReduceArray( const cGH *GH,
int proc,
int operation_handle,
int num_out_vals,
int type_out_vals,
void *out_vals,
int num_dims,
int num_in_arrays,
int type_in_arrays,
... )
call CCTK_ReduceArray(int returnvalue,
cctkGH,
int processor,
int operation_handle,
int num_out_vals,
int type_out_arrays,
void out_vals,
int num_dims,
int num_in_arrays,
int type_in_arrays,
... )
the return value of the operation. Negative value indicates failure to perform reduction. Zero indicates a successful operation.
in Fortran, the pointer to the grid hierarchy structure. Can not be used within Fortran, but can be used from within C. Since this name is fixed, write it out as shown.
in C, it is the pointer to the grid hierarchy.
the processor which collects the information, a negative value (\(-1\)) will distribute the data to all processors.
the number of the reduction operation handle, needs to be found by calling CCTK_ReductionHandle or CCTK_ReductionArrayHandle.
integer defining the number of output values.
specifies the type of the gridfunction you are communicating. Use the values as specified in Section C1.9.8. Note: Do not mix data types, e.g. in Fortran, do not declare a variable as integer and then specify the type CCTK_VARIABLE_INT in the reduction command. These types need not be the same on some architectures and will conflict.
an array that will contain the output values.
specifies the number of input fields.
indicates a variable argument list: specify the arrays which will be reduced, the number of specified arrays must be the same as the value of the num_in_fields variable.
a return value, other than zero, indicates failure to perform the operation.
Special reduction interfaces. The routines are designed for the purpose of reducing scalars, arrays and grid functions. They hide many of the options of the generic interface described above.
Reduction of local scalars across multiple processors. The result of the reduction operation will be on the specified processor or on all processors.
int CCTK_ReduceLocScalar (const cGH *GH,
int processor,
int operation_handle,
void *in_scalar,
void *out_scalar,
int data_type)
call CCTK_ReduceLocScalar(int returnvalue,
cctkGH,
int processor,
int operation_handle,
in_scalar,
out_scalar,
int data_type)
the processor local variable with local value to be reduced
the reduction result: a processor local variable with the global value (same on all processors), if processor has been set to \(-1\). Otherwise, processor will hold the reduction result.
specifies the type of the gridfunction you are communicating. Use the values as specified in Section C1.9.8.
Reduction of local 1d arrays to a local arrays. This reduction is carried out element by element. The
arrays need to have the same size on all processors.
int CCTK_ReduceLocArrayToArray1D( const cGH *GH,
int processor,
int operation_handle,
void *in_array1d,
void *out_array1d,
int xsize,
int data_type)
call CCTK_ReduceLocArrayToArray1D(int returnvalue
cctkGH,
int processor,
int operation_handle,
in_array1d,
out_array1d,
int xsize,
int data_type)
one dimensional local arrays to be reduced across a processors, element by element.
array holding the reduction result. out_array1d[1] = Reduction(in_array[1]).
the size of the one dimensional array.
Reduction of local 2d arrays to a local 2d array. This reduction is carried out element by element. The
arrays need to have the same size on all processors.
int CCTK_ReduceLocArrayToArray2D( const cGH *GH,
int processor,
int opertaion_handle,
in_array_2d,
out_array2d,
int xsize,
int ysize,
int data_type)
call CCTK_ReduceLocArrayToArray2D( int returnvalue
cctkGH,
int processor,
int operation_handle,
in_array2d,
out_array2d,
int xsize,
int ysize,
int data_type)
two dimensional local arrays, to be reduced across a processors, element by element.
two dimensional array holding the reduction result. out_array2d[i,j]= Reduction(in_array2d[i,j]).
the size of the one dimensional array in x direction.
the size of the one dimensional array in y direction.
Reduction of local 3D arrays to a local 3D array. This reduction is carried out element by element. The
arrays need to have the same size on all processors.
int CCTK_ReduceLocArrayToArray3D(const cGH *GH,
int processor,
int opertaion_handle,
in_array_3d,
out_array3d,
int xsize,
int ysize,
int zsize,
int data_type)
call CCTK_ReduceLocArrayToArray3D(int returnvalue
cctkGH,
int processor,
int operation_handle,
in_array3d,
out_array3d,
int xsize,
int ysize,
int zsize,
int data_type)
two dimensional local arrays, to be reduced across a processors, element by element.
two dimensional array holding the reduction result. out_array3d[i,j,k]= Reduction(in_array3d[i,j,k]).
the size of the one dimensional array in x direction.
the size of the one dimensional array in y direction.
the size of the one dimensional array in z direction.
Some brief examples:
Reduction of a local scalars: a local error is reduced across all processors with the maximum operation. The variable tmp will hold the maximum of the error and is the same on all processors. This quantity can then be reassigned to normerr.
CCTK_REAL normerr, tmp integer ierr, reduction_handle call CCTK_ReductionArrayHandle(reduction_handle,"maximum") if (reduction_handle.lt.0) then call CCTK_WARN(CCTK_WARN_ALERT, "Cannot get reduction handle for maximum operation.") endif call CCTK_ReduceLocScalar(ierr, cctkGH, -1, . reduction_handle, . normerr, tmp, CCTK_VARIABLE_REAL) if (ierr.ne.0) then call CCTK_WARN(CCTK_WARN_ALERT, "Reduction of norm failed!"); endif normerr = tmp
Reduction of a local 2D array: a two dimensional array \((2\times 3)\) is reduced, reduction results (array of same size: bla_tmp) are seen on all processors (\(-1\) entry as the third argument); also demonstrates some simple error checking with the CCTKi_EXPECTOK macro.
CCTK_REAL bla(2,3),bla_tmp(2,3); integer ierr, sum_handle call CCTK_ReductionArrayHandle(sum_handle,"sum") bla = 1.0d0 write (*,*) "BLA ",bla call CCTK_ReduceLocArrayToArray2D(ierr, cctkGH, -1, sum_handle, . bla, bla_tmp, 2, 3, CCTK_VARIABLE_REAL) call CCTKi_EXPECTOK(ierr, 0, 1, "2D Reduction failed") bla = bla_tmp write (*,*) "BLA ",bla
Note that the memory for the returned values must be allocated before the reduction call is made.
Note that since most source files (see Section C1.2.4 for exceptions) pass through a C preprocessor, C style comments can be used in Fortran code. Note that C++ comments (those ones starting with “//”), should only be used in C++ source code.
The flesh and the Cactus thorns use the grdoc Code Documenting System
(http://jean-luc.aei.mpg.de/Codes/grdoc/) to document source code.
To write from thorns to standard output (i.e. the screen) at runtime, use the macro CCTK_INFO or CCTK_VINFO.
For example, from the Fortran thorn MyThorn,
call CCTK_INFO("Starting Tricky Calculation")
will write the line:
INFO (MyThorn): Starting Tricky Calculation
For a multiprocessor run, only runtime information from processor zero will be printed to screen by default. The standard output of other processors will usually be discarded unless the “-r” command line option is used (Section B3.1).
Note that the macro CCTK_VINFO can only be called from C, because Fortran doesn’t know about variable argument lists. So, including variables in the info message using CCTK_INFO is currently more tricky, since you need to build the string to be output.
For example, in C you would just write
int myint;
CCTK_VINFO("The integer is %d", myint);
But in Fortran you have to do the following
integer myint
character*200 message
write (message, ’("The integer is ",i4)’) myint
call CCTK_INFO (message)
Note that
CCTK_INFO is a macro which expands to a call to the internal function CCTK_Info() and automatically includes the thorn name in function call.
CCTK_INFO should be used rather than print statements, since it will give consistent behaviour on multiprocessors, and also provides a mechanism for switching the output to screen on and off, even on a thorn-by-thorn basis. (Although this is not yet implemented).
The Cactus macros CCTK_ERROR and CCTK_VERROR should be used to output error messages and abort the code.
The Cactus macros CCTK_WARN and CCTK_VWARN should be used to issue warning messages during code execution.
Along with the warning message, an integer is given to indicate the severity of the warning. Only warnings with severity levels less than, or equal to, the global Cactus warning level threshold2 will be printed. A level 0 warning indicates the highest severity (and is guaranteed to abort the Cactus run), while larger numbers indicate less severe warnings. The global Cactus warning level threshold defaults to 1, i.e. level 1 warnings are printed, but level 2 and higher are not printed.
The severity level may actually be any integer, and a lot of existing code uses bare “magic number”
integers for warning levels, but to help standardize warning levels across thorns, new code should
probably use one of the following macros, defined in "cctk_WarnLevel.h" (which is #included by
"cctk.h"):
#define CCTK_WARN_ABORT 0 /* abort the Cactus run */ #define CCTK_WARN_ALERT 1 /* the results of this run will probably */ /* be wrong, but this isn’t quite certain, */ /* so we’re not going to abort the run */ #define CCTK_WARN_COMPLAIN 2 /* the user should know about this, but */ /* the results of this run are probably ok */ #define CCTK_WARN_PICKY 3 /* this is for small problems that can */ /* probably be ignored, but that careful */ /* people may want to know about */ #define CCTK_WARN_DEBUG 4 /* these messages are probably useful */ /* only for debugging purposes */
For example, to provide a warning for a serious problem, which indicates that the results of the run are quite
likely wrong, and which will be printed to the screen by default, a level CCTK_WARN_ALERT warning should be
used.
The syntax from Fortran is
call CCTK_WARN(CCTK_WARN_ALERT, "Your warning message")
call CCTK_ERROR("Your error message")
and from C
CCTK_WARN(CCTK_WARN_ALERT, "Your warning message");
CCTK_ERROR("Your error message");
Note that CCTK_ERROR and CCTK_WARN are macros which expand to calls to an internal function. The macros automatically include the thorn name, the source code file name and line number in the message.3 (For this reason it is important for Fortran code that capital letters are always used in order to expand the macro.)
If the flesh parameter cctk_full_warnings is set to true, then the source file name and line number will be printed to standard error along with the originating processor number, the thorn name and the warning message. The default is to omit the source file name and line number.
Note that the macros CCTK_VERROR and CCTK_VWARN can only be called from C, because Fortran doesn’t know about variable argument lists. So including variables in the warning message using CCTK_ERROR or CCTK_WARN, is currently more tricky since you need to build the string to be output.
For example, in C you would just write
int myint; double myreal; CCTK_VWARN(CCTK_WARN_ALERT, "Your warning message, including %f and %d", myreal, myint);
But in Fortran you have to do the following
integer myint
real myreal
character*200 message
write (message, ’("Your warning message, including ",g12.7," and ",i8)’) myreal, myint
call CCTK_WARN (CCTK_WARN_ALERT, message)
Beside the default methods to handle error, warning, and information messages, the flesh also implements a callback scheme to let thorn writers get information and warning messages as they are produced.4
For warning messages, a function with the following prototype
void my_warnfunc(int level, int line, const char *file, const char *thorn, const char *message, void *data);
should be implemented, and then registered with
CCTK_WarnCallbackRegister(int minlevel, int maxlevel, void *data, cctk_warnfunc my_warnfunc);
The data pointer can be used to pass arbitrary information to the registered function, e.g. a file descriptor or a format string.
Multiple functions can be registered as above; when CCTK_WARN is called, all the registered functions will be called, if the warning is within the minimum and maximum levels indicated.
The basic procedure is exactly the same for information messages.
A function registered for information messages will look like
void my_infofunc(const char *thorn, const char *message, void *data);
while the registration function looks like
CCTK_InfoCallbackRegister(void *data, cctk_infofunc my_infofunc);
Documentation is a vital part of your thorn, helping to ensure its ease of use and longevity, not only for others, but also for the thorn authors. Although any kind of independent documentation can be added to a thorn (ideally in the doc directory), there are two standard places for adding thorn documentation, a README and a doc/documentation.tex file for including in Thorn Guides.
The README, in the top level of a thorn, should contain brief and essential details about the thorn, such as the authors, any copyright details, and a synopsis of what the thorn does.
The LaTeX file, doc/documentation.tex, is included in Thorn Guides built by the Cactus make system. (e.g. by gmake \(<\)config\(>\)-ThornGuide). Ideally this file should contain complete (and up-to-date) details about the thorn, exactly what is relevant is for the authors to decide, but remember that the Cactus make system automatically parses the thorn CCL files to include information about all parameters, variables and scheduling. Suggested sections include:
Model. A description of the system which the thorn is modelling, including the equations, etc., which are being solved or implemented.
Numerical implementation. Details about how the model is numerically implemented in the thorn.
Using the thorn. Any special details needed for using the thorn, tricky parameters, particular operating systems or additional required software, interactions with other thorns and examples of use.
History. Here is where you should describe why the thorn was written, any previous software or experience which was made use of, the authors of the thorn source code and documentation, how to get hold of the thorn, etc.
References. A bibliography can be included, referencing papers published using or about this thorn, or additional information about the model or numerics used.
A LaTeX template for the Thorn Guide documentation can be found in the flesh distribution at
doc/ThornGuide/template.tex,
this file is automatically copied to the correct location in a new thorn which is created with gmake newthorn.
Since Cactus scripts need to parse this documentation, and since the LaTeX document should be consistent across all thorns included in a Thorn Guide, please follow the guidelines below when filling in the documentation:
Use the Cactus Thorn Guide style file, located in the flesh distribution at doc/latex/cactus.sty. This should be included using a relative link, so that updates to the style file are applied to all thorns.
\usepackage{../../../../doc/latex/cactus}
Aside from the date, author, and title fields, all of the documentation to be included in a Thorn Guide should be placed between the lines
% START CACTUS THORNGUIDE
and
% END CACTUS THORNGUIDE
The command \(\backslash \)def can be used to define macros, but all such definitions must lie between the START and END line. Do not redefine any standard LaTeX command
Do not use the \(\backslash \)appendix command, instead include any appendices you have as standard sections.
We only support PDF (.pdf) figures. Graphics figures should be included using the includegraphics command (not epsffig), with no file extension specified. For example,
\begin{figure}[ht]
\begin{center}
\includegraphics[width=6cm]{MyArrangement_MyThorn_MyFigure}
\end{center}
\caption{Illustration of this and that}
\label{MyArrangement_MyThorn_MyLabel}
\end{figure}
All labels, citations, references, and graphic images names should conform to the following guidelines: ARRANGEMENT_THORN_LABEL. For instance, if you arrangement is called CactusWave, your thorn WaveToyC, and your original image blackhole.eps, you should rename your image to be CactusWave_WaveToyC_blackhole.eps
References should be formatted with the standard LaTeX bibitem command, for example, a bibliography section should look like:
\begin{thebibliography}{9}
\bibitem{MyArrangement_MyThorn_Author99}
{J. Author, \textit{The Title of the Book, Journal, or periodical}, 1 (1999),
1--16. \url{http://www.nowhere.com/}}
\end{thebibliography}
To add a test suite to your thorn, devise a series of parameter files which use as many aspects of your thorn as possible. Make sure that the parameter files produce ASCII output to files, and that these files are in the directory ./<parameter file base name>.
Run Cactus on each of the parameter files, and move the parameter files, and the output directories they produced, to the test directory in your thorn.
Document carefully any situations or architectures in which your test suite does not give the correct answers.
You can also specify options for running your testsuite by adding an optional configuration file called test.ccl in the test directory. These are simple text files and may contain comments introduced by the hash ‘#’ character, which indicates that the rest of the line is a comment. If the last non-blank character of a line in a config file is a backslash ‘\(\backslash \)’, the following line is treated as a continuation of the current line. Options include test specific absolute and relative tolerances, thorn specific absolute and relative tolerances, the number of processors required to run, possible postprocessing required to correctly compare numbers, and file extensions. The configuration file has the form:
which states that when comparing files of test test_example, both absolute_tol and relative_tol should be
used as the absolute and relative tolerances. For all other tests in the thorn, the default value of absolute
and relative tolerances are set to thorn_absolute_tolerance and thorn_relative_tolerance.
Both absolute and relative tolerances can be specified on a per-file bases by supplying an optional
filename_pattern regular expression to match against a filename and the tolerance value. The specified
tolerances override more general tolerances for data files whose name matches these regular expressions.
Any set of characters can be used for matching as long as there are no whitespaces in the regular
expression.
For example:
More specific tolerances can be specified for all the tests of a thorn or just within a test’s block. It is an error if a regular expression matches more than one filename.
The NPROCS option specifies the number of processors required to run a given testsuite test_example or all
testsuites of a thorn successfully. If no NPROCS option is present, the testsuite(s) is (are) assumed to
run with any number of processors. The EXTENSIONS option adds extension_1, extension_2 and
extension_3 to the list of file extensions that are compared. This list is global over all tests in a
configuration.
Test specific tolerances have precedence over all tolerances, next come thorn wide tolerances, and then cactus default tolerances. Absolute and relative tolerances are independent: you can choose to use test specific absolute tolerance and thorn specific relative tolerance when running a test. For example,
would use an absolute tolerance of \(10^{-5}\) and a relative tolerance of \(10^{-12}\) when running test_rad and an absolute
tolerance of \(10^{-8}\) and a relative tolerance of \(10^{-12}\) when running all other tests.
In addition, postprocessing can be specified. By means of this mechanism, hdf5 files can be converted into text, or ascii files whose contents are re-ordered by running on multiple processes can be compared in a consistent manner.
The postproc directive is followed by one or two parameters. The first is the name of the postproc command, which should be an executable Linux program stored in the thorn’s util directory. The second is a regular expression which matches the files to be processed (if no regular expression is provided, the expressin ”.*” will be used, which will match anything).
The program should receive a single argument, a file name, and from it the program should produce columns of ascii formatted floating point numbers similar to what the IOASCII routines produce. The test system will run the postprocesser on both the files in the repo and the newly generated files and compare the output.
For example:
In the above example, files ending in “asc” are read using the sort-txy.pl program, and the output is streamed as text through the testing mechanism.
In this example, sort-txy.pl sorts columns first by time, then x, then y value, removing (for 2D simulations) the problems with ordering of data that sometimes occurr in simulations with more than one processor. The code for this example follows:
#!/usr/bin/env perl
use strict;
open(FD, $ARGV[0]) or die;
my $data = {};
my %t = ();
my %x = ();
my %y = ();
while(<FD>) {
# skip blank or comment lines
next if(/^\s(#.*)$/);
# Remove trailing spaces
s/\s+$//;
my @cols = split(/\s+/);
if($#cols < 2) {
print;
next;
}
my ($t,$x,$y) = ($cols[0], $cols[1], $cols[2]);
$t{$t} = 1; $x{$x} = 1; $y{$y} = 1;
$data->{$t}->{$x}->{$y} = \@cols;
}
for my $t (sort keys %t) {
for my $x (sort keys %x) {
for my $y (sort keys %y) {
print join(" ",@{$data->{$t}->{$x}->{$y}}),"\n"
if(defined($data->{$t}->{$x}->{$y}));
}
}
}
For details on running the test suites, see Section B2.6.
When writing a test suite, there are a few things you should keep in mind:
The test suite will be run together with many other test suites. It should, therefore, finish quickly (say, in under two minutes), and not use too much memory (so that it can run on a “normal” workstation).
The test suite will be run automatically, often in situations where no one checks the screen output. All important output should be via grid variables that are written to files. Alternatively, if the test suite tests some low-level infrastructure, it may just abort the simulation if it fails; that will also be detected.
Downloading many files is slow on many systems. A test suite should normally not have more than, say, hundred output files, and normally the output files should be small, so that there are not more than a few Megabytes of output files per test suite.
The test suite output files should always be the same. That means that they should not contain
time stamps, etc. It is, therefore, best to use the option IO::out_fileinfo="none".
Norms are unfortunately quite insensitive to changes to a few grid points only, even if the changes are significant. It is necessary to output grid point values directly, not only norms.
Try to use as few thorns as possible in a test case. For example, do not active 3D output thorns (unless you use it). The fewer thorns you use, the easier it is to run the test suite.
It is not necessary that a test suite result is “physically correct”, or that it uses parameters that ensure a stable time evolution. A test suite will usually take only a few time steps, so that a grid size of, e.g. \(20^3\) grid points without dissipation can be sufficient. Test suites cannot test whether the result of a simulation is physically feasible; they only test whether anything changed at all. Ensuring that the physics is still correct has to be handled by different mechanisms.
Cactus provides a flexible mechanism for timing different sections of your thorns using various clocks which have been registered with the flesh. By default, the flesh provides two clocks that measure time in different ways (provided the underlying functionality is available on your system):
Provides “wall clock time” via the unix gettimeofday function.
Provides CPU usage time via the unix getrusage function.
Additional clocks can be implemented by thorns and registered with the flesh (see Chapter C2.9).
To use Cactus timing, you create a timer, which provides time information for all the registered clocks.
You can add any number of timers to your thorn source code, providing each with a name of your choice, and then use Cactus timing functions to switch on the timers, stop or reset them, and recover timing information.
Setting the flesh parameter cactus::cctk_timer_output = "full" will cause some summary timing information to be printed at the end of a run. Some other thorns have their own timer printing parameters as well.
Many of the timing calls come in two versions, one whose name ends with the letter I, and one without. The calls whose names end with the letter I refer to the timer or clock by index, which is a non-negative int value; the other calls refer to a timer by name. If a timer is created without a name, it can be referred to only by its index, otherwise, it can be referred to by name or by index.
Typically, a negative return value from a timer function indicates an error.
Create a timer with a given name, or with no name (respectively) and return a timer index or an error code. Negative return values indicate errors. Only one timer with a given name can exist at any given time.
Reclaim resources used by a timer.
Start the given timer, using all registered clocks.
Stop the given timer on all registered clocks.
Reset the given timer on all registered clocks.
Allocate and reclaim (respectively) resources for a cTimerData structure, which will be used to hold clock values.
Fill the given cTimerData structure with clock values as of the last call to CCTK_TimerStop.
Return the number of created timers
Return the name of the timer for a given timer index (or NULL if the timer is unnamed or any other error occurs).
Take a pointer to cTimerData and return the number of clocks recorded in a timer measurement
Given a clock referred to by name or index, respectively, and a cTimerData pointer, return a cTimerVal pointer representing the value of the clock when the timer was stopped
Return the name of the clock given by the cTimerVal pointer argument.
Return the floating-point value of the resolution in seconds of the clock referred to by the cTimerVal pointer argument. This is a lower bound for the smallest non-zero difference in values between calls of CCTK_TimerClockSeconds.
Return the floating-point value of the measurement in seconds from the cTimerVal pointer argument.
The function prototypes and structure definitions are contained in the include file cctk_Timers.h, which is included in the standard thorn header file cctk.h. At the moment, the timer calls are only available from C.
The following example, which uses a timer to instrument a section of code, illustrates how timers are used by application thorns. A working example is available in the thorn CactusTest/TestTimers.
Creating a timer
The first action for any timer is to create it, using CCTK_TimerCreate. This can be performed at any time prior to use of the timer:
#include "cctk_Timers.h"
index = CCTK_TimerCreate("TimeMyStuff");
Instrumenting a section of code
Code sections are instrumented using the Start, Stop and Reset functions. These functions are applied to the chosen timer using all the registered clocks.
ierr = CCTK_TimerStart("TimeMyStuff");
do_procedure_to_be_timed();
ierr = CCTK_TimerStop("TimeMyStuff");
Accessing the timer results
After calling CCTK_TimerStop, you then get the time value from any of the registered clocks.
The procedure is to allocate a cTimerData structure, and read the information from your timer into this structure using CCTK_Timer, then to extract time data of the desired clock from this structure. After using the structure, you should destroy it.
cTimerData *info = CCTK_TimerCreateData();
int ierr = CCTK_Timer("TimeMyStuff",info);
/* You can refer to a particular clock by name. */
const cTimerVal *clock = CCTK_GetClockValue( "gettimeofday", info );
if( clock ){
printf ("\t%s: %.3f %s\n", "gettimeofday",
CCTK_TimerClockSeconds( clock ), "secs" );
}
/* To get results from all available clocks, refer to them by index.*/
nclocks = CCTK_NumTimerClocks( info );
for (i = 0; i < numclocks; i++) {
const cTimerVal *clock = CCTK_GetClockValueI( i, info );
printf ("\t%s: %.3f %s\n", CCTK_TimerClockName( clock ),
CCTK_TimerClockSeconds( clock ), "secs" );
}
CCTK_TimerDestroyData (info);
Cactus provides a mechanism for thorns to add code to include files which can be used by any other thorn. Such include files can contain executable source code, or header/declaration information. A distinction is made between these two cases, since included executable code is protected from being run if a thorn is compiled, but not active by being wrapped by a call to CCTK_IsThornActive.
Any thorn which uses the include file must declare this in its interface.ccl with the line
(If the optional [SOURCE|HEADER] is omitted, HEADER is assumed. Note that this can be dangerous, as included
source code, which is incorrectly assumed to be header code, will be executed in another thorn
even if the providing thorn is inactive. Thus, it is recommended to always include the optional
[SOURCE|HEADER] specification.) Any thorn that wishes to add to this include file, declares in its own
interface.ccl
Example As an example of this in practice, for the case of Fortran code, consider a thorn A, which wants to gather terms for a calculation from any thorn that wishes to provide them. Thorn A could have the lines in its source code
c Get source code from other thorns allterms = 0d0 #include "AllSources.inc"
and would then add to interface.ccl the line
USES INCLUDE SOURCE: AllSources.inc
If thorn B wants to add terms for the calculation, it would create a file, say Bterms.inc with the lines
c Add this to AllSources.inc allterms = allterms + 1d0
and would add to its own interface.ccl
INCLUDE SOURCE: Bterms.inc in AllSources.inc
The final file for thorn A which is compiled, will contain the code
c Get source code from other thorns
allterms = 0d0
if (CCTK_IsThornActive("B").ne.0) then
c Add this to AllSources.inc
allterms = allterms + 1d0
end if
Any Fortran thorn routines which include source code must include the declaration DECLARE_CCTK_FUNCTIONS.
Cactus provides a mechanism for overriding the standard C memory allocation routines (malloc, free, …) with Cactus specific routines that track the amount of memory allocated, and from where, the allocation call was made. This information can be accessed by the user to provide an understanding of the memory consumption between two instances, and to track down possible memory leaks. This feature is available in C only.
Memory tracing has to be activated at configure time. The standard malloc statements are overridden with macros (CCTK_MALLOC). To activate memory tracing use either
Enables all debug options (compiler debug flags, redefines malloc)
Redefine malloc only.
The CCTK_MALLOC statements can also be used directly in the C code. But by employing them this way, only a fraction of the total memory consumption is traced. Also, they cannot be turned off at configure time. For example:
machine> gmake bigbuild DEBUG=yes machine> gmake bigbuild-config DEBUG=memory
The new configuration bigbuild is configured with all debugging features turned on. The already existing configuration bigbuild is reconfigured with memory tracing only.
You can request Cactus to store the memory consumption at a certain instance in the program flow, and return the difference in memory allocation some time later.
Request a ticket: save the current total memory to a database. Return an integer (ticket). Use the ticket to calculate the difference in memory allocation between the two instances in CCTK_MemTicketCash.
Cash in your ticket: return the memory difference between now and the time the ticket was requested. Tickets can be cashed in several times. See example below. This only tracks the real data memory, which is the same as in undebug mode. It does not keep track of the internal allocations done to provide the database, the motivation is that this is not allocated either if you compile undebugged.
Delete the memory ticket. The ticket ID will not be reused, since it’s incremented with every ticket request, but the memory of the memory datastructure is deallocated.
Returns the total allocated memory (not including the tracing data structures).
Prints an info string, stating the current, past, and total memory (in bytes) allocation between two successive calls to this routine, as well as the difference.
Sample C code demonstrating the ticket handling. Two tickets are requested during malloc operations. The CCTK_MALLOC statement is used directly. They are cashed in, and the memory difference is printed. Ticket 1 is cashed twice. The tickets are deleted at the end.
int ticket1;
int ticket2;
/* store current memstate, ticket: t1*/
t1 = CCTK_MemTicketRequest();
/* allocate data */
hi = (int*) CCTK_MALLOC(10*sizeof(int));
/* store current memstate, ticket: t2*/
t2 = CCTK_MemTicketRequest();
/* cash ticket t1, print mem difference */
printf("NOW1a: %+d \n",CCTK_MemTicketCash(t1));
/* allocte some more data */
wo = (CCTK_REAL*)CCTK_MALLOC(10*sizeof(CCTK_REAL));
/* cash ticket t1 and t2, print mem difference */
printf("NOW1b: %+d \n",CCTK_MemTicketCash(t1));
printf("NOW2 : %+d \n",CCTK_MemTicketCash(t2));
/* delete the tickets from the database */
CCTK_MemTicketDelete(t1);
CCTK_MemTicketDelete(t2);
To make the following C routine,
int <routine name>(<argument list>)
...
also callable from Fortran, a new routine must be added, which is declared using the CCTK_FCALL and CCTK_FNAME macros:
void CCTK_FCALL CCTK_FNAME(<routine name>)(int *ierr, <argument list>)
<rewrite routine code, or call C routine itself>
The convention used in Cactus, is that <routine name> be the same as any C routine name, and that this is mixed-case. The macros change the case and number of underscores of the routine name to match that expected by Fortran.
All arguments passed by Fortran to the routine (except strings) are pointers in C, e.g. a call from Fortran
CCTK_INT arg1 CCTK_REAL arg2 CCTK_REAL arg3(30,30,30) ... call MyCRoutine(arg1,arg2,arg3)
should appear in C as
void CCTK_FCALL CCTK_FNAME(MyCRoutine)(CCTK_INT *arg1,
CCTK_REAL *arg2,
CCTK_REAL *arg3)
{
...
}
Fortran passes string arguments in a special, compiler-dependent, way. To facilitate this, the CCTK provides a set of macros to enable the translation to C strings. The macros are defined in cctk_FortranString.h, which should be included in your C file.
String arguments must always come last in the argument list for these macros to be effective (some Fortran compilers automatically migrate the strings to the end, so there is no portable workaround).
The macros to use depend upon the number of string arguments–we currently support up to three. The macros are <ONE|TWO|THREE>_FORTSTRING_ARG. Corresponding to each of these are two macros <ONE|TWO|THREE>_FORTSTRING_CREATE and <ONE|TWO|THREE>_FORTSTRING_PTR, which take one, two, or three arguments depending on the number of strings. The latter set is only necessary if a string is to be modified. In more detail:
Used in the argument list of the C routine to which the Fortran strings are passed.
Used in the declaration section of the C routine to which the Fortran strings are passed. These macros have one, two or three arguments which are the variable names you choose to use for the strings in the C routine, created by null-terminating the passed-in Fortran strings. The CREATE macros create new strings with the names you provide, and thus should be treated as read-only and freed after use.
These macros, used in the declaration section of the C routine after the CREATE macro, should be used if you need to modify one of the passed-in strings. They declare and define pointers to the passed-in strings.
These integer variables, automatically defined by the CREATE macro, hold the lengths of the passed in Fortran strings.
The use of the macros is probably best explained with examples. For read-only access to the strings, only the first two macros are needed, the following example compares two strings passed in from Fortran.
#include <stdlib.h>
#include <string.h>
#include <cctk_FortranString.h>
int CCTK_FCALL CCTK_FNAME(CompareStrings)(TWO_FORTSTRING_ARG)
{
int retval;
/* Allocate and create C strings with \0 at end. */
/* This makes variable declarations, so it must be before
any executable statements.*/
TWO_FORTSTRING_CREATE(arg1,arg2)
/* Do some work with the strings */
retval = strcmp(arg1,arg2);
/* Important, these must be freed after use */
free(arg1);
free(arg2);
return retval;
}
Since the null terminated strings may be copies of the strings passed from Fortran, they should be treated as read-only.
To change the data in a string passed from Fortran, you need to use the FORTSTRING_PTR macros, which declare and set up pointers to the strings passed from C. Note that this macro must be used after the FORTSTRING_CREATE macro. For example, the following routine copies the contents of the second string to the first string
#include <stdlib.h>
#include <string.h>
#include <cctk_FortranString.h>
int CCTK_FCALL CCTK_FNAME(CopyStrings)(TWO_FORTSTRING_ARG)
{
int retval;
/* Allocate and create C strings with \0 at end. */
/* This makes variable declarations, so it must be before
any executable statements. */
TWO_FORTSTRING_CREATE(arg1,arg2)
TWO_FORTSTRING_PTR(farg1,farg2)
/* Do some work with the strings */
retval = strncpy(farg1,arg2,cctk_strlen1);
/* Important, these must be freed after use */
free(arg1);
free(arg2);
return retval;
}
Note that in the example above, two new variables, pointers to the Fortran strings, were created. These are just pointers and should not be freed. The example also illustrates the automatically-created variables, e.g. cctk_strlen1, which hold the sizes of original Fortran strings. When writing to a string its length should never be exceeded.
To call a utility Fortran routine from C, use
Note that Fortran expects all arguments (apart from strings) to be pointers, so any non-array data should be passed by address.
Currently, we have no support for calling Fortran routines which expect strings from C. However, passing routines is supported when you use function aliasing, see Section C1.9.5.
Like calling functions in a different language, Cactus offers a mechanism for calling a function in a different thorn where you don ’t need to know which thorn is actually providing the function, nor what language the function is provided in. The idea of function aliasing is similar to that of thorns; the routine that calls a function should not need to know anything about it, except that the function exists.
Function aliasing is quite restrictive, because of the problems involved in inter-language calling, as seen in the previous section. Function aliasing is also comparatively inefficient, and should not be used in a part of your code where efficiency is important.
Function aliasing is language-neutral, however, the syntax is strongly based on C. In the future, the function aliasing declarations may go into a new functions.ccl file, and will have a format more similar to that of variable group and parameter declarations.
To use an aliased function you must first declare it in your interface.ccl file. Declare the prototype as, for example,
CCTK_REAL FUNCTION SumStuff(CCTK_REAL IN x, CCTK_REAL IN y)
and that this function will be either required in your thorn by
REQUIRES FUNCTION SumStuff
or optionally used in your thorn by
USES FUNCTION SumStuff
A prototype of this function will be available to any C routine that includes the cctk.h header file. In a Fortran file, the declaration of the function will be included in the DECLARE_CCTK_FUNCTIONS macro, which is available after the statement #include "cctk_Functions.h". The keywords IN, OUT, and INOUT work in the same fashion as INTENT statements in Fortran 90. That is, the C prototype will expect an argument with intent IN to be a value and one with intent OUT or INOUT to be a pointer. There also exists the ARRAY keyword for passing arrays of any dimension. Functions which are required by some thorn (which doesn’t provide it itself) are checked at startup to be provided by some other thorn.
To provide an aliased function you must again add the prototype to your interface.ccl file. A statement containing the name of the providing function and the language it is provided in, must also be given. For example,
CCTK_REAL FUNCTION SumStuff(CCTK_REAL IN x, CCTK_REAL IN y) PROVIDES FUNCTION SumStuff WITH AddItUp LANGUAGE C
The appropriate function must then be provided somewhere in this thorn. Multiple thorns providing the same function can be compiled into the same configuration; however, only one providing thorn may be activated at runtime, otherwise, an error message is printed and the run is aborted.
It is necessary to specify the language of the providing function; no default will be assumed.
Various restrictions are necessary to make function aliasing work. These are
The return type of any function must be either void or one of the Cactus data types CCTK_INT or CCTK_REAL. Standard types such as int are not allowed.
The type of an argument must be one of scalar types CCTK_INT, CCTK_REAL, CCTK_COMPLEX, CCTK_STRING, CCTK_POINTER, CCTK_FPOINTER, or an array or pointer type CCTK_INT ARRAY, CCTK_REAL ARRAY, CCTK_COMPLEX ARRAY, CCTK_POINTER ARRAY.5 The scalar types are assumed to be not modifiable. Any changes made to a scalar argument by a providing function may be silently lost, or may not; it is dependent on the language of the providing and calling function. If you wish to modify an argument, then it must have intent OUT or INOUT (and hence must be either a CCTK_INT, a CCTK_REAL, or a CCTK_COMPLEX, or an array of one of these types).
The name of both, the aliased and providing function, are restricted. They must follow the standard C semantics (start with a letter, contain only letters, numbers or underscores). Additionally, they must be mixed case (that is, contain at least one uppercase and one lowercase letter). The names of the aliased and providing functions must be distinct.
If an argument is a function pointer, then the syntax looks like
CCTK_REAL Integrate(CCTK_REAL CCTK_FPOINTER func(CCTK_REAL IN x), \
CCTK_REAL IN xmin, CCTK_REAL IN xmax)
It is assumed that the function pointer argument has the same language as the calling function. Function pointer arguments may not be nested.
CCTK_STRING arguments follow the same conventions as in the previous section. That is, they must appear at the end of the argument list, there must be at most three, and a function with a CCTK_STRING argument can only be provided in C, not Fortran, although they may be called from either.
A C function is provided to add together two real numbers. The interface.ccl should read
CCTK_REAL FUNCTION SumStuff(CCTK_REAL IN x, CCTK_REAL IN y)
PROVIDES FUNCTION SumStuff WITH AddItUp LANGUAGE C
USES FUNCTION SumStuff
A Fortran function is provided to invert a real number. The interface.ccl should read
SUBROUTINE Invert(CCTK_REAL INOUT x)
PROVIDES FUNCTION Invert WITH FindInverse LANGUAGE Fortran
USES FUNCTION Invert
Note that SUBROUTINE has the same meaning as void FUNCTION.
A Fortran function is provided to integrate any function over an interval. The interface.ccl should read
CCTK_REAL Integrate(CCTK_REAL CCTK_FPOINTER func(CCTK_REAL IN x), \
CCTK_REAL IN xmin, CCTK_REAL IN xmax)
PROVIDES FUNCTION Integrate WITH SimpsonsRule LANGUAGE Fortran
USES FUNCTION Integrate
The calling thorn does not know if an aliased function is even provided by another thorn. Calling an aliased function that has not been provided, will lead to a level 0 warning message, stopping the code. In order to check if a function has been provided by some thorn, use the CCTK_IsFunctionAliased function described in the function reference section.
Thorn names must not start with the word “Cactus” (in any case).
Arrangements will be ignored if their names start with a hash mark ‘#’ or dot ‘.’, or end with a tilde ‘~’, .bak or .BAK.
Thorns will be ignored if they are called doc or start with a hash mark ‘#’ or dot ‘.’, or end with a tilde ‘~’, .bak or .BAK.
Routine names have to be unique among all thorns.
Names of global variables have to be unique among all thorns.
The following naming conventions are followed by the flesh and the supported Cactus arrangements. They are not compulsory, but if followed, will allow for a homogeneous code.
Parameters: lower case (except for acronyms) with words separated by an underscore. Examples: my_first_parameter, solve_PDE_equation.
Routine names and names of global variables: Prefixed by thorn name with an underscore, then capitalised words, with no spaces. Fortran modules should be placed into source files that have the same name as the module (see section C1.6.2.0.0 for details). Examples: MyThorn_StartUpRoutine, BestSolver_InitialDataForPDE, BestSolver_SpectralGrid.
Cactus knows about the following fixed size data types:
| Data Type | Size (bytes) | Variable Type | Fortran Equivalent |
| CCTK_BYTE | 1 | CCTK_VARIABLE_BYTE | integer*1 |
| CCTK_INT1 | 1 | CCTK_VARIABLE_INT1 | integer*1 |
| CCTK_INT2 | 2 | CCTK_VARIABLE_INT2 | integer*2 |
| CCTK_INT4 | 4 | CCTK_VARIABLE_INT4 | integer*4 |
| CCTK_INT8 | 8 | CCTK_VARIABLE_INT8 | integer*8 |
| CCTK_REAL4 | 4 | CCTK_VARIABLE_REAL4 | real*4 |
| CCTK_REAL8 | 8 | CCTK_VARIABLE_REAL8 | real*8 |
| CCTK_REAL16 | 16 | CCTK_VARIABLE_REAL16 | real*16 |
| CCTK_COMPLEX8 | 8 | CCTK_VARIABLE_COMPLEX8 | complex*8 |
| CCTK_COMPLEX16 | 16 | CCTK_VARIABLE_COMPLEX16 | complex*16 |
| CCTK_COMPLEX32 | 32 | CCTK_VARIABLE_COMPLEX32 | complex*32 |
The availability of these types, and the corresponding C data types, are platform-dependent. For each fixed-size data type, there exists a corresponding preprocessor macro HAVE_<data type>, which should be used to check whether the given CCTK data type is supported, e.g.
/* declare variable with extended-precision complex data type if available, otherwise, with default CCTK precision */ #ifdef HAVE_CCTK_COMPLEX32 CCTK_COMPLEX32 var; #else CCTK_COMPLEX var; #endif
In addition, Cactus provides three generic numeric data types which map onto the compilers’ native data types used to represent integer, real, and complex values. The size for these generic types can be chosen at configuration time (see Section B2.1.1). This is to allow the code to be run easily at different precisions. Note that the effectiveness of running the code, at a lower or higher precision, depends crucially on all thorns being used making consistent use of the these generic data types:
| Data Type | Variable Type | Configuration Option | |
| CCTK_INT | CCTK_VARIABLE_INT | INTEGER_PRECISION | |
| CCTK_REAL | CCTK_VARIABLE_REAL | REAL_PRECISION | |
| CCTK_COMPLEX | CCTK_VARIABLE_COMPLEX | Same as real precision | |
These variable types must be used by thorn writers to declare variables in the thorn interface files, and may be used to declare variables in the thorn routines. Note that variable declarations in thorns should obviously match the definitions in the interface files where appropriate.
A set of macros, which are interpreted by the preprocessor at compile time, to signify which data size is being used, are also provided:
| Data Type | #define |
| CCTK_INT1 | CCTK_INT_PRECISION_1 |
| CCTK_INT2 | CCTK_INT_PRECISION_2 |
| CCTK_INT4 | CCTK_INT_PRECISION_4 |
| CCTK_INT8 | CCTK_INT_PRECISION_8 |
| CCTK_REAL4 | CCTK_REAL_PRECISION_4 |
| CCTK_REAL8 | CCTK_REAL_PRECISION_8 |
| CCTK_REAL16 | CCTK_REAL_PRECISION_16 |
| CCTK_COMPLEX8 | CCTK_COMPLEX_PRECISION_8 |
| CCTK_COMPLEX16 | CCTK_COMPLEX_PRECISION_16 |
| CCTK_COMPLEX32 | CCTK_COMPLEX_PRECISION_32 |
Cactus also provides generic data and function pointers, which can be used from either C or Fortran:
| Data Type | Variable Type | C equivalent |
| CCTK_POINTER | CCTK_VARIABLE_POINTER | void *data_ptr |
| CCTK_POINTER_TO_CONST | CCTK_VARIABLE_POINTER_TO_CONST | const void *data_ptr |
| CCTK_FPOINTER | CCTK_VARIABLE_FPOINTER | void (*fn_ptr)(void) |
Cactus provides the data types CCTK_POINTER and CCTK_POINTER_TO_CONST for use in Fortran code to declare a pointer passed from C. For example, the variable cctkGH is of the type CCTK_POINTER. The data type CCTK_STRING is, in Fortran, also an opaque type; it corresponds to a C pointer, and one has to use the function CCTK_FortranString to convert it to a Fortran string, or the CCTK_Equals to compare it to a Fortran String.
Since the data types, integer in Fortran and int in C, may be different6 , many routines that can be called from both, C and Fortran, take arguments of the type CCTK_INT. This type can be different from the type integer. Fortran does not convert routine arguments automatically, and it is, therefore, necessary to pay attention to the exact argument types that a routine expects, and to convert between integer and CCTK_INT, accordingly. Currently, most flesh functions take integer arguments, while all aliased functions take CCTK_INT arguments.
NOTE: If you make errors in passing Fortran arguments, and if there are no interfaces (“prototypes”) available for the routines that are called, then the compiler cannot detect these errors. Be careful, when you write Fortran code yourself, consider placing routines in modules, which implicitly define interfaces for all contained routines.
There are two convenient ways to convert between these types. An easy way, is to define parameters or to declare variables of the desired type, assign a value to these parameters or variables, and then pass the parameter or value. This makes for very readable code, since the name of the parameter or variable serves as additional documentation:
CCTK_INT, parameter : jtwo = 2 integer :: vindex_gxx, vindex_kxx CCTK_INT :: syncvars(jtwo) call CCTK_VarIndex (vindex_gxx, "ADMBase::gxx") call CCTK_VarIndex (vindex_kxx, "ADMBase::kxx") syncvars(1) = vindex_gxx syncvars(2) = vindex_kxx call CCTK_SyncGroupsI (cctkGH, jtwo, syncvars)
(You have probably seen the strange Fortran convention, where people introduce constants named zero or two—it is a convenient way to make sure that the constant has the correct type.)
Another possibility are explicit type conversions. They can rather easily be added to existing code:
! Boilerplate code to determine type kinds integer, parameter :: izero = 0 ! A dummy variable of type integer CCTK_INT, parameter :: jzero = 0 ! A dummy variable of type CCTK_ITN integer, parameter :: ik = kind (izero) ! The kind of "integer" integer, parameter :: jk = kind (jzero) ! The kind of "CCTK_INT" integer :: syncvars(2) call CCTK_VarIndex (syncvars(1), "ADMBase::gxx") call CCTK_VarIndex (syncvars(2), "ADMBase::kxx") call CCTK_SyncGroupsI (cctkGH, int(2,jk), int(syncvars,jk))
Fortran distinguishes between different integer kinds. These kinds are what is different between integer and CCTK_INT. The expression int(EXPR,KIND) converts EXPR to an integer of kind KIND. Above, we use the convention that the prefix i denotes things having to do with integer, and the prefix j denotes CCTK_INT.
Note that we declare the array syncvars with the type that is necessary to set its values. Type conversions are only possible if variables are read, not when they are written to.
Concepts and terminology (Overloading and registration of functions)
The cGH structure — what it is and how to use it
Extending the cGH structure
Querying group and variable information
Providing an I/O layer
Providing a communication layer
Providing a reduction operator
Providing an interpolation operator
Overloadable functions
The flesh defines a core API which guarantees the presence of a set of functions. Although the flesh guarantees the presence of these functions, they can be provided by thorns. Thorns do this by either the overloading or the registration of functions.
Some functions can only be provided by one thorn. The first thorn to overload this function succeeds, and any later attempt to overload the function fails. For each overloadable function, there is a function with a name something like CCTK_Overload... which is passed the function pointer.
Some functions may be provided by several thorns. The thorns register their function with the flesh, and when the flesh-provided function is called, the flesh calls all the registered functions.
A GH extension is a way to associate data with each cGH. This data should be data that is required to be associated with a particular GH by a thorn.
Each GH extension is given a unique handle.
An I/O method is a distinct way to output data. Each I/O method has a unique name, and the flesh-provided I/O functions operate on all registered I/O methods.
A GH extension is created by calling CCTK_RegisterGHExtension, with the name of the extension. This returns a unique handle that identifies the extension. (This handle can be retrieved at any time by a call to CCTK_GHExtensionHandle.)
Associated with a GH extension are three functions
this is used to actually create the data structure holding the extension. It is called when a new cGH is created.
this is used to initialise the extension. It is called after the scheduler has been initialised on the cGH.
this is called whenever the schedule tree is due to be traversed on the GH. It should initialise the data on the cGH and the call CCTK_ScheduleTraverse to traverse the schedule tree.
| Function | Default |
| CCTK_Initialise | |
| CCTK_Evolve | |
| CCTK_Shutdown | |
| Function | Default |
| CCTK_SyncGroup | |
| CCTK_SyncGroupsByDirI | |
| CCTK_EnableGroupStorage | |
| CCTK_DisableGroupStorage | |
| CCTK_QueryMaxTimeLevels | |
| CCTK_EnableGroupComm | |
| CCTK_DisableGroupComm | |
| CCTK_Barrier | |
| CCTK_Reduce | |
| CCTK_Interp | |
| CCTK_ParallelInit | |
| Function | Default |
| CCTK_OutputGH | |
| CCTK_OutputVarAsByMethod | |
The flesh does not know about memory allocation for grid variables, about how to communicate data when synchronisation is called for, or about multiple patches or adaptive mesh refinement. All this is the job of a driver.
This chapter describes how to add a driver to your code.
A driver consists of a Startup routine which creates a GH extension, registers its associated functions, and overloads the communication functions. It may optionally register interpolation, reduction, and I/O methods.
A driver may also overload the default Initialisation and Evolution routines, although a simple unigrid evolver is supplied in the flesh.
A driver consists of a GH extension, and the following overloaded functions.
CCTK_EnableGroupStorage
CCTK_DisableGroupStorage
CCTK_QueryMaxTimeLevels
CCTK_ArrayGroupSizeB
CCTK_QueryGroupStorageB
CCTK_SyncGroup
CCTK_SyncGroupsByDirI
CCTK_EnableGroupComm
CCTK_DisableGroupComm
CCTK_Barrier
CCTK_OverloadParallelInit
CCTK_OverloadExit
CCTK_OverloadAbort
CCTK_OverloadMyProc
CCTK_OverloadnProcs
The overloadable function CCTK_SyncGroup is deprecated, a driver should instead provide a routine to overload the more general function CCTK_SyncGroupsByDirI.
The GH extension is where the driver stores all its grid-dependent information. This is stuff like any data associated with a grid variable (e.g. storage and communication state), how many grids if it is AMR, ... It is very difficult to describe in general, but one simple example might be
struct SimpleExtension
{
/* The data associated with each variable */
/* data[var][timelevel][ijk] */
void ***data
} ;
with a SetupGH routine like
struct SimpleExtension *SimpleSetupGH(tFleshConfig *config, int conv_level, cGH *GH)
{
struct SimpleExtension *extension;
extension = NULL;
if(conv_level < max_conv_level)
{
/* Create the extension */
extension = malloc(sizeof(struct SimpleExtension));
/* Allocate data for all the variables */
extension->data = malloc(num_vars*sizeof(void**));
for(var = 0 ; var < num_vars; var++)
{
/* Allocate the memory for the time levels */
extension->data[var] = malloc(num_var_time_levels*sizeof(void *));
for(time_level = 0; time_level < num_var_time_level; time_level++)
{
/* Initialise the data to NULL */
extension->data[var][time_level] = NULL;
}
}
}
return extension;
}
Basically, what this example is doing is preparing a data array for use. The function can query the flesh for information on every variable. Note that scalars should always have memory actually assigned to them.
An InitGH function isn’t strictly necessary, and in this case, it could just be a dummy function.
The ScheduleTraverseGH function needs to fill out the cGH data, and then call CCTK_ScheduleTraverse to have the functions scheduled at that point executed on the grid
int SimpleScheduleTraverseGH(cGH *GH, const char *where)
{
int retcode;
int var;
int gtype;
int ntimelevels;
int level;
int idir;
extension = (struct SimpleExtension *)GH->extensions[SimpleExtension];
#ifdef CCTK_HAVE_CGH_LEVEL
GH->cctk_level = 0;
#endif
#ifdef CCTK_HAVE_CGH_COMPONENT
GH->cctk_component = extension->myproc;
#endif
for (idir=0;idir<GH->cctk_dim;idir++)
{
GH->cctk_levfac[idir] = 1;
GH->cctk_nghostzones[idir] = extension->nghostzones[idir];
GH->cctk_lsh[idir] = extension->lnsize[idir];
GH->cctk_gsh[idir] = extension->nsize[idir];
GH->cctk_bbox[2*idir] = extension->lb[extension->myproc][idir] == 0;
GH->cctk_bbox[2*idir+1] = extension->ub[extension->myproc][idir]
== extension->nsize[idir]-1;
GH->cctk_lbnd[idir] = extension->lb[extension->myproc][idir];
GH->cctk_ubnd[idir] = extension->ub[extension->myproc][idir];
#ifdef CCTK_HAVE_CGH_TILE
GH->cctk_tile_min[idir] = extension->tmin[extension->myproc][idir];
GH->cctk_tile_max[idir] = extension->tmax[extension->myproc][idir];
#endif
}
for(var = 0; var < extension->nvariables; var++)
{
gtype = CCTK_GroupTypeFromVarI(var);
ntimelevels = CCTK_MaxTimeLevelsVI(var);
for(level = 0; level < ntimelevels; level++)
{
switch(gtype)
{
case CCTK_SCALAR :
GH->data[var][level] = extension->variables[var][level];
break;
case CCTK_GF :
GH->data[var][level] =
((pGF ***)(extension->variables))[var][level]->data;
break;
case CCTK_ARRAY :
GH->data[var][level] =
((pGA ***)(extension->variables))[var][level]->data;
break;
default:
CCTK_WARN(CCTK_WARN_ALERT,"Unknown group type in SimpleScheduleTraverse");
}
}
}
retcode = CCTK_ScheduleTraverse(where, GH, NULL);
return retcode;
}
The third argument to CCTK_ScheduleTraverse is actually a function which will be called by the scheduler when it wants to call a function scheduled by a thorn. This function is given some information about the function to call, and is an alternative place where the cGH can be setup.
This function is optional, but a simple implementation might be
int SimpleCallFunction(void *function,
cFunctionData *fdata,
void *data)
{
void (*standardfunc)(void *);
int (*noargsfunc)(void);
switch(fdata->type)
{
case FunctionNoArgs:
noargsfunc = (int (*)(void))function;
noargsfunc();
break;
case FunctionStandard:
switch(fdata->language)
{
case LangC:
standardfunc = (void (*)(void *))function;
standardfunc(data);
break;
case LangFortran:
fdata->FortranCaller(data, function);
break;
default :
CCTK_WARN(CCTK_WARN_ALERT, "Unknown language.");
}
break;
default :
CCTK_WARN(CCTK_WARN_ALERT, "Unknown function type.");
}
/* Return 0, meaning didn’t synchronise */
return 0;
}
The return code of the function signifies whether or not the function synchronised the groups in this functions synchronisation list of not.
The flesh will synchronise them if the function returns false.
Providing this function is probably the easiest way to do multi-patch or AMR drivers.
These consist of
CCTK_EnableGroupStorage
CCTK_DisableGroupStorage
CCTK_QueryMaxTimeLevels
CCTK_QueryGroupStorageB
CCTK_ArrayGroupSizeB
These are responsible for switching the memory for all variables in a group on or off. They should return the former state, e.g. if the group already has storage assigned, they should return 1.
In our simple example above, the enabling routine would look something like
int SimpleEnableGroupStorage(cGH *GH, const char *groupname)
{
extension = (struct SimpleExtension *)GH->extensions[SimpleExtension];
if(extension->data[first][0][0] == NULL)
{
for(var = first; var <= last; var++)
{
allocate memory for all time levels;
}
retcode = 0;
}
else
{
retcode = 1;
}
return retcode;
}
The disable function is basically the reverse of the enable one.
The CCTK_QueryMaxTimeLevels function returns the maximum number of timelevels ever activated for a given group ie. the size of the data member of cGH.
The QueryGroupStorage function basically returns true or false if there is storage for the group, and the ArrayGroupSize returns the size of the grid function or array group in a particular direction.
These are the communication analogues to the storage functions. Basically, they flag that communication is to be done on that group or not, and may initialise data structures for the communication.
The flesh by itself does not provide output for grid variables or other data. Instead, it provides a mechanism for thorns to register their own routines as I/O methods, and to invoke these I/O methods by either the flesh scheduler or by other thorn routines.
This chapter explains how to implement your own I/O methods and register them with the flesh.
All I/O methods have to be registered with the flesh before they can be used.
The flesh I/O registration API provides a routine CCTK_RegisterIOMethod() to create a handle for a new I/O method which is identified by its name (this name must be unique for all I/O methods). With such a handle, a thorn can then register a set of functions (using the CCTK_RegisterIOMethod*() routines from the flesh) for doing periodic, triggered, and/or unconditional output.
The following example shows how a thorn would register an I/O method, SimpleIO, with routines to provide all these different types of output.
void SimpleIO_Startup (void)
{
int handle = CCTK_RegisterIOMethod ("SimpleIO");
if (handle >= 0)
{
CCTK_RegisterIOMethodOutputGH (handle, SimpleIO_OutputGH);
CCTK_RegisterIOMethodTimeToOutput (handle, SimpleIO_TimeToOutput);
CCTK_RegisterIOMethodTriggerOutput (handle, SimpleIO_TriggerOutput);
CCTK_RegisterIOMethodOutputVarAs (handle, SimpleIO_OutputVarAs);
}
}
The flesh scheduler will automatically call CCTK_OutputGH() at every iteration after the CCTK_ANALYSIS time bin. This function loops over all I/O methods and calls their routines registered as OutputGH() (see also Section C1.2.3.0).
As its return code, it should pass back the number of variables which were output at the current iteration, or zero if no output was done by this I/O method.
Besides the periodic output at every so many iterations using OutputGH(), analysis and output of grid variables can also be done via triggers. For this, a TimeToOutput() routine is registered with an I/O method. This routine will be called by the flesh scheduler at every iteration before CCTK_ANALYSIS with the triggering variable(s) as defined in the schedule block for all CCTK_ANALYSIS routines (see Section C1.5.4).
If the TimeToOutput() routine decides that it is now time to do output, the flesh scheduler will invoke the corresponding analysis routine and also request output of the triggering variable(s) using TriggerOutput().
An I/O method’s OutputVarAs() routine is supposed to do output for a specific grid variable if ever possible. It will be invoked by the flesh I/O API routines CCTK_OutputVar*() for unconditional, non-triggered output of grid variables (see also Section C1.7.3).
A function registered as an OutputVarAs() routine has the following prototype:
The OutputVarAs() routine should return zero if output for varname was done successfully, or a negative error code otherwise.
Like for I/O methods, checkpointing/recovery functionality must be implemented by thorns. The flesh only provides specific time bins at which the scheduler will call thorns’ routines, in order to perform checkpointing and/or recovery.
This chapter explains how to implement checkpointing and recovery methods in your thorn. For further information, see the documentation for thorn CactusBase/IOUtil.
Thorns register their checkpointing routines at CCTK_CPINITIAL and/or CCTK_CHECKPOINT and/or CCTK_TERMINATE. These time bins are scheduled right after all initial data has been set up, after every evolution timestep, and after the last time step of a simulation, respectively. (See Section C1.2.3.0 for a description of all timebins). Depending on parameter settings, the checkpoint routines decide whether to write an initial data checkpoint, and when to write an evolution checkpoint.
Each checkpoint routine should save all information to persistent storage, which is necessary to restart the simulation at a later time from exactly the same state. Such information would include
the current settings of all parameters
the contents of all grid variables which have global storage assigned and are not tagged with
checkpoint="no" (see also Section D2.2.4 on page D16 for a list of possible tags)
Note that grid variables should be synced before writing them to disk.
other relevant information such as the current iteration number and physical time, the number of processors, etc.
Recovering from a checkpoint is a two-phase operation for which the flesh provides distinct timebins for recovery routines to be scheduled at:
This time bin is executed before CCTK_STARTUP, in which the parameter file is
parsed. From these parameter settings, the recovery routines should decide whether
recovery was requested, and if so, restore all parameters from the checkpoint file
and overwrite those which aren’t steerable.
The flesh loops over all registered recovery routines to find out whether recovery was
requested. Each recovery routine should, therefore, return a positive integer value
for successful parameter recovery (causing a shortcut of the loop over all registered
recovery routines), zero for no recovery, or a negative value to flag an error.
If recovery was requested, but no routine could successfully recover parameters,
the flesh will abort the run with an error message. If no routine recovered any
parameters, i.e. if all parameter recovery routines returned zero, then this indicates
that this run is not a recovery run.
If parameter recovery
was performed successfully, the scheduler will set the recovered flag which—in
combination with the setting of the Cactus::recovery_mode parameter—decides
whether any thorn routine scheduled for CCTK_INITIAL and CCTK_POSTINITIAL
will be called. The default is to not execute these initial time bins during recovery,
because the initial data will be set up from the checkpoint file during the following
CCTK_RECOVER_VARIABLES time bin.
Recovery routines scheduled for this time bin are responsible for restoring the
contents of all grid variables with storage assigned from the checkpoint.
Depending on the setting of Cactus::recovery_mode, they should also decide how
to treat errors in recovering individual grid variables. Strict recovery (which is the
default) requires all variables to be restored successfully (and will stop the code
if not), whereas a relaxed mode could, e.g. allow for grid variables, which are not
found in the checkpoint file, to be gracefully ignored during recovery.
To add a Cactus clock, you need to write several functions to provide the timer functionality (see Section C1.9.1), and then register these functions with the flesh as a named clock.
The function pointers are placed in function pointer fields of a cClockFuncs structure. The fields of this structure are are:
void *(*create)(int)
void (*destroy)(int, void *)
void (*start)(int, void *)
void (*stop)(int, void *)
void (*reset)(int, void *)
void (*get)(int, void *, cTimerVal *)
void (*set)(int, void *, cTimerVal *)
int
The first int argument of the functions may be used in any way you see fit.
The n_vals field holds the number of elements in the vals array field of the cTimerVal structure used by your timer (usually 1).
The return value of the create function will be a pointer to a new structure representing your clock.
The second void* argument of all the other functions will be the pointer returned from the create function.
The get and set functions should write to and read from (respectively) a structure pointed to by the cTimerVal* argument:
typedef enum {val_none, val_int, val_long, val_double} cTimerValType;
typedef struct
{
cTimerValType type;
const char *heading;
const char *units;
union
{
int i;
long int l;
double d;
} val;
double seconds;
double resolution;
} cTimerVal;
The heading field is the name of the clock, the units field holds a string describing the type held in the val field, and the seconds field is the time elapsed in seconds. The resolution field is the smallest non-zero difference in values of two calls to the timer, in seconds. For example, it could reflect that the clock saves the time value internally as an integer value representing milliseconds.
To name and register the clock with the flesh, call the function
See function aliasing.
Automatic Mesh Refinement
Applications Programming Interface, the interface provided by some software component to programmers who use the component. An API usually consists of subroutine/function calls, but may also include structure definitions and definition of constant values. The Cactus Reference Manual documents most of the Cactus flesh APIs.
A collection of thorns, stored in a subdirectory of the Cactus arrangements
directory. See Section C1.1.2.
A GNU program which builds a configuration script which can be used to make a Makefile.
A boundary zone is a set of points at the edge of a grid, interpreted as the boundary of the physical problem, and which contains boundary data, e.g. Dirichlet conditions or von Neumann conditions. (See also symmetry zone, ghost zone.)
Distinctive and unusual plant, which is adapted to extremely arid and hot environments, showing a wide range of anatomical and physiological features which conserve water. Cacti stems have expanded into green succulent structures containing the chlorophyll necessary for life and growth, while the leaves have become the spines for which cacti are so well known.1
Cactus Computational Tool Kit (The Cactus flesh and computational thorns).
The Cactus Configuration Language, this is the language that the thorn configuration files are written in. See Section D2.
The combination of a set of thorns, and all the Cactus configure options which affect
what binary will be produced when compiling Cactus. For example, the choice of
compilers and linker (Cactus CC, CXX, CUCC, F90, and LD configure options) and
the compiler optimization settings (OPTIMISE/OPTIMIZE and *_OPTIMISE_FLAGS
configure options) are part of a configuration (these flags change what binary is
produced), but the Cactus VERBOSE and WARN configure options aren’t part of a
configuration (they don’t change what binary will be produced). See Section A1.2.1.
Get a copy of source code from git. See Section A1.1.
Save the entire state of a Cactus run to a file, so that the run can be restarted at a later time. See Sections A3, C2.8.
A discrete finite set of spatial points in \(\Re ^n\) (typically, \(1 \le n \le 3\)). Historically, Cactus has required these points to be uniformly spaced (uniformly spaced grid), but now, Cactus supports non-uniform spacings (non-uniformly spaced grid), and mesh refinement.
The grid consists of the physical domain and the boundary and symmetry points.
See grid functions for the typical use of grid points.
Important, but often neglected.
The Cactus Specification Tool, which is the set of Perl scripts which parse the thorns’ .ccl files, and generates the code that binds the thorn source files with the flesh.
git is the favoured code distribution system for Cactus. See Section A1.1.
The technique of breaking up a large computational problem into parts that are easier to solve. In Cactus, it refers especially to a decomposition wherein the parts are solved in parallel on separate computer processors.
A special kind of thorn which creates and handles grid hierarchies and grid variables. Drivers are responsible for memory management for grid variables, and for all parallel operations, in response to requests from the scheduler. See Section C1.6.3.
An iteration interpreted as a step through time. Also, a particular Cactus schedule bin for executing routines when evolution occurs.
The Cactus routines which hold the thorns together, allowing them to communicate and scheduling things to happen with them. This is what you get if you check out Cactus from our git repository.
Interfaces that are friends, share their collective set of protected grid variables. See Section D2.2 C1.2.3.0.
The process of referring to a function to be provided by an interface independently of which thorn actually contains the function, or what language the function is written in. The function is called an alias function. See Section C1.9.5, D2.2.3.
Shorthand for a grid array.
Shorthand for a grid function.
GNU version of the make utility.
A set of points added for parallelisation purposes to a block of a grid lying on one processor, corresponding to points on the boundary of an adjoining block of the grid lying on another processor. Points from the boundary of the one block are copied (via an inter-processor communication mechanism) during synchronisation to the corresponding ghost zone of the other block, and vice versa. In single processor runs there are no ghost zones. Contrast with symmetry or boundary zones. See Section C1.3.5.
Short for computational grid.
A grid variable whose global size need not be that of the computational grid; instead,
the size is declared explicitly in an interface.ccl file.
A grid variable whose global size is the size of the computational grid. (See also local array.) From another perspective, grid functions are functions (of any of the Cactus data types (see Section C1.9.8) defined on the domain of grid points. Typically, grid functions are used to discretely approximate functions defined on the domain \(\Re ^n\), with finite differencing used to approximate partial derivatives.
A computational grid, and the grid variables associated with it.
A spatial point in the computational grid.
A grid variable with index zero, i.e. just a number on each processor.
A variable which is passed through the flesh interface, either between thorns or between routines of the same thorn. This implies the variable is related to the computational grid, as opposed to being an internal variable of the thorn or one of its routines. grid scalar, grid function, and grid array are all examples of grid variables. See Sections C1.3.2, D2.2.4
The GNU program we use for reporting and tracking bugs, comments and suggestions.
GNU’s Not Unix: a freely-distributable code project. See http://www.gnu.org/.
Shorthand for grid variable.
A signed integer value \(>= 0\) passed by many Cactus routines and used to represent a dynamic data or code object.
Hierarchical Data Format version 5, an API, subroutine library, and file format for storing structured data. An HDF5 file can store both data (for example, Cactus grid variables), and meta data (data describing the other data, for example, Cactus coordinate systems). See Section B2.2, also https://www.hdfgroup.org/HDF5/.
Defines the interface that a thorn presents to the rest of a Cactus program. See Section C1.1.3.
A thorn that inherits from another implementation can access all the other implementation’s public variables. See Section D2.2, C1.2.3.0.
Given a set of grid variables and interpolation points (points in the grid coordinate space, which are typically distinct from the grid points), interpolation is the act of producing values for the grid variables at each interpolation point over the entire grid hierarchy. (Contrast with local interpolation.)
An array that is declared in thorn code, but not declared in the thorn’s
interface.ccl, as opposed to a grid array.
Given a set of grid variables and interpolation points (points in the grid coordinate space ,which are typically distinct from the grid points), interpolation is the act of producing values for the grid variables at each interpolation point on a particular grid. (Contrast with interpolation.)
The default input file for make (or gmake). Includes rules for building targets.
A system for building software. It uses rules involving dependencies of one part of software on another, and information of what has changed since the last build, to determine what parts need to be built.
Message Passing Interface, an API and software library for sending messages between processors in a multiprocessor system. See Section B2.2.
See recursion, mutual.
The C programming language uses a “NUL character” to terminate character
strings. A NUL character has the integer value zero, but it’s useful to write it as
’\0’, to emphasize to human readers that this has type char rather than int.
C defines a “null pointer”, often (slightly incorrectly) called a “NULL pointer”,
which is guaranteed not to point to any object. You get a null pointer by converting
the integer constant 0 to a pointer type, e.g. int* ptr = 0;.2
Many programmers prefer to use the predefined macro NULL (defined in <stdlib.h>,
<stdio.h>, and possibly other system header files) to create null pointers,
e.g. int* ptr = NULL;, to emphasize to human readers that this is a null pointer
rather than “just” the integer zero.
Note that it is explicitly not defined whether a null pointer is represented by a bit pattern of all zero bits—this varies from system to system, and there are real-world systems where null pointers are, in fact, not represented this way.
For further information, see the section “Null pointers” in the (excellent) comp.lang.c FAQ, available online at http://www.eskimo.com/~scs/C-faq/top.html.
The process of utilising multiple computer processors to work on different parts of a computational problem at the same time, in order to obtain a solution of the problem more quickly. Cactus achieves parallelisation by means of domain decomposition.
A variable that controls the run time behaviour of the Cactus executable. Parameters have default values which can be set in a parameter file. (See Chapter C1.4). The flesh has parameters; thorn parameters are made available to the rest of Cactus by describing them in the thorn’s param.ccl file (See Appendix D2.3).
(Also called par file.) A text file used as the input of a Cactus program, specifying initial values of thorn parameters. See Section B3.2.
The default driver thorn for Cactus which uses MPI. See Section B1.1.
Parallel Virtual Machine, provides interprocessor communication. See Section B1.1.
See mutual recursion.
Given a set of grid variables on a computational grid, reduction is the process of producing values for the variables on a proper subset of points from the grid.
The part of the Cactus flesh that determines the order and circumstances in which to execute Cactus routines. Thorn functions and schedule groups are registered with the flesh via the thorn’s schedule.ccl file to be executed in a certain schedule bin, before or after another function or group executes, and so forth. See section D2.4 C1.5,
One of a set of special timebins pre-defined by Cactus. See Section D4 for a list.
A timebin defined by a thorn, in its schedule.ccl file (see Appendix D2.4). Each schedule group must be defined to occur in a Cactus schedule bin or another schedule group. See Chapter C1.5, C1.5.1.
An implementation may share restricted parameters with another implementation, which means the other implementation can get the parameter values, and if the parameters are steerable, it can change them. See Section D2.3 C1.2.3.0.
A parameter which can be changed at any time after the program has been initialised. See Section C1.4.3.
A grid operation that is a manifestation of a geometrical symmetry, especially rotation or reflection.
A set of points laying at the edge of the computational grid and containing data obtained by some symmetry operation from another part of the same grid. (Contrast with boundary zone, ghost zone.)
The process of copying information from the outer part of a computational interior on one processor to the corresponding ghost zone (see) on another processor. Also refers to a special Cactus timebin corresponding to the occurrence of this process. See Section C1.3.5.
See Section D7.
A make target is the name of a set of rules for make (or gmake). When the target is included in the command line for make, the rules are executed, usually to build some software.
A collection of subroutines defining a Cactus interface. See Chapters C1.1, C1.2.
A file used by the Cactus CST to determine which thorns to compile into a Cactus executable (see Section B2.4.1, B2.4.2). Can also be used to determine which thorns to check out from git. (see Section A1.1). A ThornList for each Cactus configuration lies in the configuration subdirectory of the Cactus configs directory.
A time interval in the duration of a Cactus run wherein the flesh runs specified routines. See scheduler, schedule bin.
A Cactus API for reporting time. See Section C1.9.1.
Each thorn is configured by three compulsory and one optional files in the top level thorn directory:
interface.ccl
param.ccl
schedule.ccl
configuration.ccl (optional)
These files are written in the Cactus Configuration Language which is case insensitive.
The interface configuration file consists of:
A header block giving details of the thorn’s relationship with other thorns.
A block detailing which include files are used from other thorns, and which include files are provided by this thorn.
Blocks detailing aliased functions provided or used by this thorn.
A series of blocks listing the thorn’s global variables.
(For a more extensive discussion of Cactus variables, see Chapter C1.3.)
The header block has the form:
The implementation name must be unique among all thorns, except between thorns which have the same public and protected variables and global and restricted parameters.
Inheriting from another implementation makes all that implementation’s public variables available to your thorn. At least one thorn providing any inherited implementation must be present at compile time. A thorn cannot inherit from itself. Inheritance is transitive (if \(A\) inherits from \(B\), and \(B\) inherits from \(C\), then \(A\) also implicitly inherits from \(C\)), but not commutative.
Being a friend of another implementation makes all that implementation’s protected variables available to your thorn. At least one thorn providing an implementation for each friend must be present at compile time. A thorn cannot be its own friend. Friendship is associative, commutative and transitive (i.e. if \(A\) is a friend of \(B\), and \(B\) is a friend of \(C\), then \(A\) is implicitly a friend of \(C\)).
The include file section has the form:
SOURCE, the included code is only executed if the providing thorn is active. Both default to
HEADER.
If any aliased function is to be used or provided by the thorn, then the prototype must be declared with the form:
void, CCTK_INT, CCTK_REAL, CCTK_COMPLEX, CCTK_POINTER, or
CCTK_POINTER_TO_CONST. The keyword SUBROUTINE is equivalent to void FUNCTION. The name of the aliased
function <alias> must contain at least one uppercase and one lowercase letter and follow the C standard for
function names. The type of each argument, <arg*_type>, must be either CCTK_INT, CCTK_REAL, CCTK_COMPLEX,
CCTK_POINTER, CCTK_POINTER_TO_CONST, or STRING. All string arguments must be the last arguments in the
list. The intent of each argument, <intent*>, must be either IN, OUT, or INOUT. An argument may only be
modified if it is declared to have intent OUT or INOUT. If the argument is an array then the prefix ARRAY must
also be given.
If the argument <arg*> is a function pointer, then the argument itself (which will preceded by the return type) should be
If an aliased function is to be required, then the block
If an aliased function is to be (optionally) used, then the block
If a function is provided, then the block
C and Fortran.
The thorn’s variables are collected into groups. This is not only for convenience, but for collecting like variables together. Storage assignment, communication assignment, and ghostzone synchronization take place for groups only.
The thorn’s variables are defined by:
access defines which thorns can use the following groups of variables. access can be either public, protected or private.
data_type defines the data type of the variables in the group. Supported data types are CHAR, BYTE, INT, REAL, and COMPLEX.
group_name must be an alphanumeric name (which may also contain underscores) which is unique across group and variable names within the scope of the thorn. A group name is compulsory.
[number], if present, indicates that this is a vector group. The number can be any valid arithmetical expression consisting of integers or integer-valued parameters. Each variable in that group appears as a one-dimensional array of grid variables. When the variable is accessed in the code, then the last index is the member-index, and any other indices are the normal spatial indices for a group of this type and dimension.
TYPE designates the kind of variables held by the group. The choices are GF, ARRAY or SCALAR. This field is optional, with the default variable type being SCALAR.
DIM defines the spatial dimension of the ARRAY or GF. The default value is DIM=3.
TIMELEVELS defines the number of timelevels a group has if the group is of type ARRAY or GF, and can take any positive value. The default is one timelevel.
SIZE defines the number grid-points an ARRAY has in each direction. This should be a comma-separated list of valid arithmetical expressions consisting of integers or integer-valued parameters.
DISTRIB defines the processor decomposition of an ARRAY. DISTRIB=DEFAULT distributes SIZE grid-points across all processors. DISTRIB=CONSTANT implies that SIZE grid-points should be allocated on each processor. The default value is DISTRIB=DEFAULT.
GHOSTSIZE defines number of ghost zones in each dimension of an ARRAY. It defaults to zero.
TAGS defines an optional string which is used to create a set of key-value pairs associated with
the group. The keys are case independent. The string (which must be deliminated by single or
double quotes) is interpreted by the function Util_TableSetFromString(), which is described in
the Reference Manual.
Currently the CST parser and the flesh do not evaluate any information passed in an optional
TAGS string. Thorns may do so by querying the key/value table information for a group by
using CCTK_GroupTagsTable() and the appropriate Util_TableGet*() utility functions (see the
ReferenceManual for detailed descriptions).
For a list of currently supported TAGS key-value table information, please refer to the corresponding
chapter in the documentation of the CactusDoc arrangement. (Section B2.5 on page B30 explains
how to build this documentation).
The (optional) block following the group declaration line, contains a list of variables contained in the group. All variables in a group have the same data type, variable type, dimension and distribution. The list can be separated by spaces, commas, or new lines. The variable names must be unique within the scope of the thorn. A variable can only be a member of one group. The block must be delimited by brackets on new lines. If no block is given after a group declaration line, a variable with the same name as the group is created. Apart from this case, a group name cannot be the same as the name of any variable seen by this thorn.
An optional description of the group can be given on the last line. If the variable block is omitted, this description can be given at the end of the declaration line.
The process of sharing code among thorns using include files is discussed in Section C1.9.2.
The parameter configuration file consists of a list of parameter object specification items (OSIs) giving the type and range of the parameter separated by optional parameter data scoping items (DSIs), which detail access to the parameter. (For a more extensive discussion of Cactus parameters, see Chapter C1.4.)
The keyword access designates that all parameter object specification items, up to the next parameter data scoping item, are in the same protection or scoping class. access can take the values:
all thorns have access to global parameters
other thorns can have access to these parameters, if they specifically request it in their own param.ccl
only your thorn has access to private parameters
in this case, an implementation name must follow the colon. It declares that all the parameters in the following scoping block are restricted variables from the specified implementation. (Note: only one implementation can be specified on this line.)
The parameter values depend on the parameter type, which may be one of the following:
The specification of parameter values takes the form of one or more lines, each of the form
The range specification is the same as with integers, except that here, no step implies a continuum of values. Note that numeric constants should be expressed as in C (e.g. 1e-10). Note also that one cannot use the Cactus types such as CCTK_REAL4 to specify the precision of the parameter; parameters always have the default precision.
Each entry in the list of acceptable values for a keyword has the form
Allowed values for strings should be specified using regular expressions. To allow any string, the regular expression "" should be used. (An empty regular expression matches anything.) Regular expressions and string values should be enclosed in double quotes. The double quotes are mandatory if the regular expression or the string value is empty or contains spaces.
No parameter values should be specified for a boolean parameter. The default value for a boolean can be
True: 1, yes, y, t, true
False: 0, no, n, f, false
Boolean values may optionally be enclosed in double quotes.
The parameter name must be unique within the scope of the thorn.
The default value must match one of the ranges given in the parameter type
A thorn can declare that it EXTENDS a parameter of another thorn. This allows it to declare additional acceptable values. By default, it is acceptable for two thorns to declare the same value as acceptable.
If the thorn wants to simply use a parameter from another thorn, without declaring additional values, use USES instead.
[len] (where len is an integer), if present, indicates that this is an array parameter of len values of the specified type. (Note that the notation used above for the parameter specification breaks down here, as there must be square brackets around the length).
alias allows a parameter to appear under a different name in this thorn, other than its original name in another thorn. The name, as seen in the parameter file, is unchanged.
STEERABLE specifies when a parameter value may be changed. By default, parameters may not be changed after the parameter file has been read, or on restarting from checkpoint. This option relaxes this restriction, specifying that the parameter may be changed at recovery time from a parameter file or at any time using the flesh routine CCTK_ParameterSet—see the Reference Guide.
The value RECOVERY is used in checkpoint/recovery situations, and indicates that the parameter may be altered until the value is read in from a recovery par file, but not after.
ACCUMULATOR specifies that this is an accumulator parameter. Such parameters cannot be set directly, but are set by other parameters who specify this one as an ACCUMULATOR-BASE. The expression is a two-parameter arithmetical expression of \(x\) and \(y\). Setting the parameter consists of evaluating this expression successively, with \(x\) being the current value of the parameter (at the first iteration this is the default value), and \(y\) the value of the setting parameter. This procedure is repeated, starting from the default value of the parameter, each time one of the setting parameters changes.
ACCUMULATOR-BASE specifies the name of an ACCUMULATOR parameter which this parameter sets.
(A more extensive discussion of Cactus scheduling is provided in Chapter C1.5.) A schedule configuration file consists of:
Assignment statements to switch on storage for grid variables for the entire duration of program execution.
Schedule blocks to schedule a subroutine from a thorn to be called at specific times during program execution in a given manner.
Conditional statements for both assignment statements and schedule blocks to allow them to be processed depending on parameter values.
Assignment statements, currently only assign storage.
These lines have the form:
If the thorn is active, storage will be allocated, for the given groups, for the duration of program execution (unless storage is explicitly switched off by some call to CCTK_DisableGroupStorage within a thorn).
The storage line includes the number of timelevels to activate storage for, this number can be from 1 up to the maximum number or timelevels for the group, as specified in the defining interface.ccl file. If the maximum number of timelevels is 1 (the default), this number may be omitted. Alternatively timelevels can be the name of a parameter accessible to the thorn. The parameter name is the same as used in C routines of the thorn, fully qualified parameter names of the form thorn::parameter are not allowed. In this case 0 (zero) timelevels can be requested, which is equivalent to the STORAGE statement being absent.
The behaviour of an assignment statement is independent of its position in the schedule file (so long as it is outside a schedule block).
Each schedule block in the file schedule.ccl must have the syntax
\
\
\
\
Schedule a schedule group with the same options as a schedule function. The schedule group will be created if it doesn’t exist.
The name of a function or a schedule group to be scheduled. Function and schedule group names are case sensitive.
A group of grid variables. Variable groups inherited from other thorns may be used, but they must then be fully qualified with the implementation name.
Functions can be scheduled to run at the Cactus schedule bins, for example, CCTK_EVOL, and CCTK_STARTUP. A complete list and description of these is provided in Appendix D4. The initial letters CCTK_ are optional. Grid variables cannot be used in the CCTK_STARTUP and CCTK_SHUTDOWN timebins.
Schedules a function or schedule group to run in a schedule group, rather than in a Cactus timebin.
Provides an alias for a function or schedule group which should be used for scheduling before, after or in. This can be used to provide thorn independence for other thorns scheduling functions, or schedule groups relative to this one.
Executes a function or schedule group until the given variable (which must be a fully qualified integer grid scalar) has the value zero.
Executes a function or schedule group only if the given variable (which must be a fully qualified integer grid scalar) has a non-zero value.
Takes a function name, a function alias, a schedule group name, or a parentheses-enclosed whitespace-separated list of these. (Any names that are not provided by an active thorn are ignored.) Note that a single schedule block may have multiple BEFORE/AFTER clauses. See Section C1.5 (“Scheduling”) in the Cactus Users’ Guide for more information about BEFORE/AFTER clauses.
The code language for the function (either C or FORTRAN). No language should be specified for a schedule group.
Schedule options are used for mesh refinement and multi-block simulations, and they determine “where” a routine executes. Possible options are:
(default, may be omitted)
(Only one of these options may be used.) These options can be combined with the following:
(At most one of the loop_... options may be used.)
Schedule tags. These tags must have the form keyword=value, and must be in a syntax accepted by Util_TableCreateFromString.
List of variable groups which should have storage switched on for the duration of the function or schedule group. Each group must specify how many timelevels to activate storage for, from 1 up to the maximum number for the group as specified in the defining interface.ccl file. If the maximum is 1 (the default) this number may be omitted. Alternatively timelevels can be the name of a parameter accessible to the thorn. The parameter name is the same as used in C routines of the thorn, fully qualified parameter names of the form thorn::parameter are not allowed. In this case 0 (zero) timelevels can be requested, which is equivalent to the STORAGE statement being absent.
READS/WRITES are used to declare which grid variables are read/written by the routine. This information is used e.g. to determine which variables need to be synchronized, copied between host and device for OpenCL or CUDA kernel, or poisoned as part of error checking.
READS/WRITE directives can be applied to either a variable or a group of variables and may also contain a region specification. The region specification can be EVERYWHERE, or ALL, INTERIOR, or IN, INTERIOWITHBOUNDARY, or BOUNDARY. A missing region defaults to EVERYWHERE for READS and INTERIOR for WRITES. If a function needs to read a given grid function everywhere and only the interior is valid (i.e. has been written to), then a synchronization is required and will happen automatically if enabled with the Cactus parameter presync_mode.
When grid functions are updated in this way, not only ghost zones, but boundary zones will be updated by the drier. Use either the function Driver_SelectGroupForBC or Driver_SelectVarForBC to tell the driver how it should update a group or variable. The arguments to both functions are the same as those found in the Boundary thorn, but with the prefix Boundary_ instead of Driver_:
Driver_SelectGroupForBC(CCTK_ARGUMENTS,
CCTK_INT faces,
CCTK_INT width,
CCTK_INT table_handle,
CCTK_STRING group_name,
CCTK_STRING bc_name)
Driver_SelectVarForBC(CCTK_ARGUMENTS,
CCTK_INT faces,
CCTK_INT width,
CCTK_INT table_handle,
CCTK_STRING var_name,
CCTK_STRING bc_name)
Note that the above two functions, unlike their similarly named components in the Boundary thorn, only need to be called once. The information they provide will then be used each time the driver synchronizes the named grid function or group.
It is possible, however, that the thorn you are creating does not know the correct READS/WRITES information at compile time. I/O thorns, for example, do not know which grid functions they will access until run time. Likewise, the Method of Lines thorn does not know which grid functions it is operating on until run time.
For situations like these, we have the following functions which can be used to check READS/WRITES data and perform synchronization at run time: Driver_RequireValidData, Driver_NotifyDataModified, Driver_GetValidRegion, and Driver_SetValidRegion. For details on these functions, please consult the Reference Manual.
List of grid variables or groups to be used as triggers for causing an ANALYSIS function or group to be executed. Any schedule block for an analysis function or analysis group may contain a TRIGGER line.
List of groups to be synchronised, as soon as the function or schedule group is exited.
List of additional options (see below) for the scheduled function or group of functions
Cactus understands the following options. These options are interpreted by the driver, not by Cactus. The current set of options is useful for Berger-Oliger mesh refinement which has subcycling in time, and for multi-patch simulations in which the domain is split into several distinct patches. Given this, the meanings of the options below is only tentative, and their exact meaning needs to be obtained from the driver documentation. The standard driver PUGH ignores all options.
Option names are case-insensitive. There can be several options given at the same time.
This routine will only be called once, even if several simulations are performed at the same time. This can be used, for example, to initialise external libraries, or to set up data structures that live in global variables.
This option is identical to to META option with the exception that the routine will be called together with the routines on the first subgrid.
This option is identical to to META option with the exception that the routine will be called together with the routines on the last subgrid.
This routine will only be called once on a grid hierarchy, not for all subgrids making up the hierarchy. This can be used, for example, for analysis routines which use global reduction or interpolation routines, rather than the local subgrid passed to them, and hence should only be called once.
This option is identical to to GLOBAL option with the exception that the routine will be called together with the routines on the first subgrid.
This option is identical to to GLOBAL option with the exception that the routine will be called together with the routines on the last subgrid.
This routine will only be called once on any “level” of the grid hierarchy. That is, it will only be called once for any set of sub-grids which have the same cctk_levfac and cctk_level numbers.
This routine will only be called once on any of the “patches” that form a “level” of the grid hierarchy.
This routine will be called on every “component”, identified by their cctk_component number.
When the above options are used, it is often the case that a certain routine should, e.g. be called at the time for a GLOBAL routine, but should actually loop over all “components”. The following set of options allows this:
Loop once.
Loop over all simulations.
Loop over all “levels”.
Loop over all “patches”.
Loop over all “components”.
For example, the specification
Any schedule block or assignment statements can be optionally surrounded by conditional if-elseif-else constructs using the parameter data base. These can be nested, and have the general form:
¡conditional-expression¿ can be any valid C construct evaluating to a truth value. Such conditionals are evaluated only at program startup, and are used to pick between different static schedule options. For dynamic scheduling, the SCHEDULE WHILE construction should be used.
Conditional constructs cannot be used inside a schedule block.
[NOTE: The configuration.ccl is still relatively new, and not all features listed below may be fully implemented or functional.]
A configuration.ccl file defines capabilities which a thorn either provides or requires, or may use if available. Unlike implementations, only one thorn providing a particular capability may be compiled into a configuration at one time. Thus, this mechanism may be used to, for example: provide access to external libraries; provide access to functions which other thorns must call, but are too complex for function aliasing; or to split a thorn into several thorns, all of which require some common (not aliased) functions.
A configuration options file can contain any number of the following sections:
Informs the CST that this thorn provides a given capability, and that this capability has a given detection script which may be used to configure it (e.g. running an autoconf script or detecting an external library’s location). The script should output configuration information on its standard output—the syntax is described below in Section D2.5.1. The script may also indicate the failure to detect a capability by returning a non-zero exit code; this will stop the build after the CST stage.
All capabilities have an optional version attached to them, so that other thorns can depend on such a specific version. Version strings can only contain letters, numbers, or “.+-:” (dot, plus, minus, colon), and have to start with a number. Specifying a version number is optional. If none is given, “0.0.1” is assumed.
Scripts can be in any language. If an interpreter is needed to run the script, for example Perl, this should
be indicated by the LANG option.
The specified options are checked for in the original configuration, and any options passed on the command line (including an ‘options’ file) at compile time when the thorn is added, or if the CST is rerun. These options need be set only once, and will be remembered between builds.
Informs the CST that this thorn requires a certain capability to be present. If no thorn providing the capability is in the ThornList, the build will stop after the CST stage.
Optionally, thorns can depend on a capability version. This has to be enclosed in parentheses, following the capability name. Inside the parenthesis, first a comparison operator determines the kind of dependency on the requested capability version, which has to be attached without spaces. Valid operators and their meaning are:
Requesting capability strictly older than given version
Requesting capability older or equal to given version
Requesting capability exactly equal to given version
Requesting capability newer or equal to given version
Requesting capability strictly newer than given version.
Version strings are compared from left to right. First the initial part of each string consisting entirely of digits is determined. The integer values of these two parts are compared. If a difference is found it is returned. Then the initial part of the remainder of each string which consists entirely of non-digit characters is determined. The two parts are compared lexically, and any difference found is returned as the result of the comparison. The lexical comparison is a comparison of ASCII values. These two steps (comparing and removing initial non-digit strings and initial digit strings) are repeated until a difference is found or both strings are exhausted. Spaces inside the parentheses are allowed, except inside the operator or version string.
Example:
Informs the CST that this thorn may use a certain capability, if a thorn providing it is in the
ThornList. If present, the preprocessor macro, macro, will be defined and given the value
“1”.
The configuration script may tell the CST to add certain features to the Cactus environment—either to the make system or to header files included by thorns. It does this by outputting lines to its standard output:
Places a set of definitions in a header file which will be included by all thorns using this capability (either through an OPTIONAL or REQUIRES entry in their configuration.ccl files).
Adds a directory to the include path used for compiling files in thorns using this capability.
Adds a makefile definition into the compilation of all thorns using this capability.
Adds makefile dependency information into the compilation of all thorns using this capability.
Adds a library to the final cactus link.
Adds a directory to the list of directories searched for libraries at link time.
No other lines should be output by the script.
As well as the high-level CCTK_* routines, Cactus also provides a set of lower-level Util_* utility routines, which
are mostly independent of the rest of Cactus. This chapter gives a general overview of programming with these
utility routines.
Cactus functions may need to pass information through a generic interface. In the past, we have used various ad
hoc means to do this, and we often had trouble passing ”extra” information that wasn’t anticipated in the
original design. For example, for periodic output of grid variables, CCTK_OutputVarAsByMethod() requires that
any parameters (such as hyperslabbing parameters) be appended as an option string to the variable’s character
string name. Similarly, elliptic solvers often need to pass various parameters, but we haven’t had a good way to
do this.
Key/value tables (tables for short) provide a clean solution to these problems. They’re implemented by the
Util_Table* functions (described in detail in the Reference Manual).
Basically, a table is an object which maps strings to almost arbitrary user-defined data. (If you know Perl, a table is very much like a Perl hash table. Alternatively, if you know Unix shells, a table is like the set of all environment variables. As yet another analogy, if you know Awk, a table is like an Awk associative array.)1
More formally, a table is an object which stores a set of keys and a corresponding set of values. We refer to a (key,value) pair as a table entry.
Keys are C-style null-terminated character strings, with the slash character ‘/’ reserved for future expansion.2
Values are 1-dimensional arrays of any of the usual Cactus data types, described in Section C1.9.8. A string
can be stored by treating it as a 1-dimensional array of CCTK_CHAR (there’s an example of this
below).
The basic “life cycle” of a table looks like this:
Some code creates it with Util_TableCreate() or Util_TableClone().
Some code (often the same piece of code, but maybe some other piece) sets entries in it
using one or more of the Util_TableSet*(), Util_TableSet*Array(), Util_TableSetGeneric(),
Util_TableSetGenericArray(), and/or Util_TableSetString() functions.
Some other piece or pieces of code can get (copies of) the values which were set, using
one or more of the Util_TableGet*(), Util_TableGet*Array(), Util_TableGetGeneric(),
Util_TableGetGenericArray(), and/or Util_TableGetString() functions.
When everyone is through with a table, some (single) piece of code should destroy it with
Util_TableDestroy().
There are also convenience functions Util_TableSetFromString() to set entries in a table based on a
parameter-file-style string, and Util_TableCreateFromString() to create a table and then set entries in it
based on a parameter-file-style string.
As well, there are “table iterator” functions Util_TableIt*() to allow manipulation of a table even if you don’t
know its keys.
A table has an integer “flags word” which may be used to specify various options, via bit flags defined in
util_Table.h. For example, the flags word can be used to control whether keys should be compared as case
sensitive or case insensitive strings. See the detailed function description of Util_TableCreate() in the
Reference Manual for a list of the possible bit flags and their semantics.
Here’s a simple example (in C)3 of how to use a table:
#include "util_Table.h" #include "cctk.h" /* create a table and set some entries in it */ int handle = Util_TableCreate(UTIL_TABLE_FLAGS_DEFAULT); Util_TableSetInt(handle, 2, "two"); Util_TableSetReal(handle, 3.14, "pi"); ... /* get the values from the table */ CCTK_INT two_value; CCTK_REAL pi_value; Util_TableGetInt(handle, &two_value, "two"); /* sets two_value = 2 */ Util_TableGetReal(handle, &pi_value, "pi"); /* sets pi_value = 3.14 */
Actually, you shouldn’t write code like this—in the real world errors sometimes happen, and it’s much better to catch them close to their point of occurrence, rather than silently produce garbage results or crash your program. So, the right thing to do is to always check for errors. To allow this, all the table routines return a status, which is zero or positive for a successful return, but negative if and only if some sort of error has occurred.4 So, the above example should be rewritten like this:
#include "util_Table.h" /* create a table and set some entries in it */ int handle = Util_TableCreate(UTIL_TABLE_FLAGS_DEFAULT); if (handle < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t create table!"); /* try to set some table entries */ if (Util_TableSetInt(handle, 2, "two") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t set integer value in table!"); if (Util_TableSetReal(handle, 3.14, "pi") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t set real value in table!"); ... /* try to get the values from the table */ CCTK_INT two_value; CCTK_REAL pi_value; if (Util_TableGetInt(handle, &two_value, "two") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get integer value from table!"); if (Util_TableGetReal(handle, &pi_value, "pi") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get integer value from table!"); /* if we get to here, then two_value = 2 and pi_value = 3.14 */
As well as a single numbers (or characters or pointers), tables can also store 1-dimensional arrays of numbers (or characters or pointers).5
For example (continuing the previous example):
static const CCTK_INT a[3] = { 42, 69, 105 };
if (Util_TableSetIntArray(handle, 3, a, "my array") < 0)
CCTK_WARN(CCTK_WARN_ABORT, "couldn’t set integer array value in table!");
...
CCTK_INT blah[10];
int count = Util_TableGetIntArray(handle, 10, blah, "my array");
if (count < 0)
CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get integer array value from table!");
/* now count = 3, blah[0] = 42, blah[1] = 69, blah[2] = 105, */
/* and all remaining elements of blah[] are unchanged */
As you can see, a table entry remembers the length of any array value that has been stored in it.6
If you only want the first few values of a larger array, just pass in the appropriate length of your array, that’s OK:
CCTK_INT blah2[2]; int count = Util_TableGetIntArray(handle, 2, blah2, "my array"); if (count < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get integer array value from table!"); /* now count = 3, blah2[0] = 42, blah2[1] = 69 */
You can even ask for just the first value:
CCTK_INT blah1; int count = Util_TableGetInt(handle, &blah1, "my array"); if (count < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get integer array value from table!"); /* now count = 3, blah1 = 42 */
One very common thing you might want to store in a table is a character string. While you could do this by
explicitly storing an array of CCTK_CHAR, there are also routines specially for conveniently setting and getting
strings:
if (Util_TableSetString(handle, "black holes are fun", "bh") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t set string value in table!"); ... char buffer[50]; if (Util_TableGetString(handle, 50, buffer, "bh") < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t get string value from table!"); /* now buffer[] contains the string "black holes are fun" */
Util_TableGetString() guarantees that the string is terminated by a null character (‘\0’), and also returns an
error if the string is too long for the buffer.
There are also convenience routines for the common case of setting values in a table based on a string.
For example, the following code sets up exactly the same table as the example in Section D3.2.3:
#include <util_Table.h> /* create a table and set some values in it */ int handle = Util_TableCreate(UTIL_TABLE_FLAGS_DEFAULT); if (handle < 0) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t create table!"); /* try to set some table entries */ if (Util_TableSetFromString(handle, "two=2 pi=3.14") != 2) CCTK_WARN(CCTK_WARN_ABORT, "couldn’t set values in table!");
There is also an even higher-level convenience function Util_TableCreateFromString(): this creates a table
with the case insensitive flag set (to match Cactus parameter file semantics), then (assuming no errors occurred)
calls Util_TableSetFromString() to set values in the table.
For example, the following code sets up a table (with the case insensitive flag set) with four entries: an integer number (two), a real number (pi), a string (buffer), and an integer array with three elements (array):
#include <util_Table.h>
int handle = Util_TableCreateFromString(" two = 2 "
" pi = 3.14 "
" buffer = ’Hello World’ "
" array = { 1 2 3 }");
if (handle < 0)
CCTK_WARN(CCTK_WARN_ABORT, "couldn’t create table from string!");
Note that this code passes a single string to
Util_TableCreateFromString()7 ,
which then gets parsed into key/value pairs, with the key separated from its corresponding value by an equals
sign.
Values for numbers are converted into integers (CCTK_INT) if possible (no decimal point appears in the value), otherwise into reals (CCTK_REAL). Strings must be enclosed in either single or double quotes. String values in single quotes are interpreted literally, strings in double quotes may contain character escape codes which then will be interpreted as in C. Arrays must be enclosed in curly braces, array elements must be single numbers of the same type (either all integer or all real).
In the examples up to now, the code, which wanted to get values from the table, knew what the keys were. It’s also useful to be able to write generic code which can operate on a table without knowing the keys. “Table iterators” (“iterators”, for short) are used for this.
An iterator is an abstraction of a pointer to a particular table entry. Iterators are analogous to the DIR *
pointers used by the POSIX opendir(), readdir(), closedir(), and similar functions, to Perl hash
tables’ each(), keys(), and values(), and to the C++ Standard Template Library’s forward
iterators.
At any time, the entries in a table may be considered to be in some arbitrary (implementation-defined) order; an
iterator may be used to walk through some or all of the table entries in this order. This order is guaranteed to
remain unchanged for any given table, so long as no changes are made to that table, i.e. so long as no
Util_TableSet*(), Util_TableSet*Array(), Util_TableSetGeneric(), Util_TableSetGenericArray(),
Util_TableSetString(), or Util_TableDeleteKey() calls are made on that table (making such calls on
other tables doesn’t matter). The order may change if there is any change in the table, and it may
differ even between different tables with identical key/value contents (including those produced by
Util_TableClone()).8
Any change in the table also invalidates all iterators pointing anywhere in the table; using any such iterator is an error. Multiple iterators may point into the same table; they all use the same order, and (unlike in Perl) they’re all independent.
The detailed function description in the Reference Manual for Util_TableItQueryKeyValueInfo() has an
example of using an iterator to print out all the entries in a table.
At the moment, the table functions are not thread-safe in a multithreaded environment.
Note that tables and iterators are process-wide, i.e. all threads see the same tables and iterators (think of them
as like the Unix current working directory, with the various routines which modify the table or change iterators
acting like a Unix chdir() system call).
In a multiprocessor environment, tables are always processor-local.
Tables do not themselves have names or other attributes. However, we may add some special “system tables” to be used by Cactus itself to store this sort of information for those cases where it’s needed. For example, we may add support for a “checkpoint me” bit in a table’s flags word, so that if you want a table to be checkpointed, you just need to set this bit. In this case, the table will probably get a system generated name in the checkpoint dump file. But if you want the table to have some other name in the dump file, then you need to tell the checkpointing code that, by setting an appropriate entry in a checkpoint table. (You would find the checkpoint table by looking in a special “master system table” that records handles of other interesting tables.)
Using the schedule.ccl files, thorn functions can be scheduled to run in the different timebins which are executed by the Cactus flesh. This chapter describes these standard timebins, and shows the flow of program execution through them.
Scheduled functions must be declared as
#include "cctk_Arguments.h"
void MyFunction (CCTK_ARGUMENTS);
#include "cctk_Arguments.h"
extern "C" void MyFunction (CCTK_ARGUMENTS);
#include "cctk_Arguments.h"
subroutine MyFunction (CCTK_ARGUMENTS)
DECLARE_CCTK_ARGUMENTS
end
Exceptions are the functions that are scheduled in the bins CCTK_STARTUP, CCTK_RECOVER_PARAMETERS, and CCTK_SHUTDOWN. They do not take arguments, and they return an integer. They must be declared as
int MyFunction (void);
extern "C" int MyFunction ();
integer function MyFunction ()
end
The return value in CCTK_STARTUP and CCTK_SHUTDOWN is unused, and might in the future be used to indicate whether an error occurred. You should return 0.
The return value in CCTK_RECOVER_PARAMETERS should be zero, positive, or negative, indicating that no parameters were recovered, that parameters were recovered successfully, or that an error occurred, respectively. Routines in this bin are executed in alphabetical order, according to the owning thorn’s name, until one returns a positive value. All later routines are ignored. Schedule clauses BEFORE, AFTER, WHILE, IF, etc., are ignored.
Used by thorns with relevant I/O methods as the point to read parameters when recovering from checkpoint files. Grid variables are not available in this timebin. Scheduling in this timebin is special (see above).
Run before any grids are constructed, this is the timebin, for example, where grid independent information (e.g. output methods, reduction operators) is registered. Note that since no grids are setup at this point, grid variables cannot be used in routines scheduled here.
This timebin is executed when all parameters are known, but before the driver thorn constructs the grid. It should only be used to set up information that is needed by the driver.
This timebin is for thorns to check the validity of parameter combinations. This bin is also executed before the grid hierarchy is made, so that routines scheduled here only have access to the global grid size and the parameters.
This timebin is used in mesh refinement settings. It is ignored for unigrid runs. This bin is executed whenever the grid hierarchy is about to change during evolution; compare CCTK_PREREGRID. Routines that decide the new grid structure should be scheduled in this bin.
This timebin is used in mesh refinement settings. It is ignored for unigrid runs. This bin is executed whenever the grid hierarchy or patch setup has changed during evolution; see CCTK_POSTREGRID. It is, e.g. necessary to re-apply the boundary conditions or recalculate the grid points’ coordinates after every changing the grid hierarchy.
This timebin is executed very early after a driver thorn constructs grid; this bin should only be used to set up coordinate systems on the newly created grids.
This is the place to set up any required initial data. This timebin is not run when recovering from a checkpoint file.
This is the place to modify initial data, or to calculate data that depend on the initial data. This timebin is also not run when recovering from a checkpoint file.
This timebin is used only in mesh refinement settings. It is ignored for unigrid runs. This bin is executed after each restriction operation while initial data are set up; compare CCTK_POSTRESTRICT. It is, e.g. necessary to re-apply the boundary conditions after every restriction operation.
This is the place to modify initial data, or to calculate data that depend on the initial data. This timebin is executed after the recursive initialisation of finer grids if there is a mesh refinement hierarchy, and it is also not run when recovering from a checkpoint file.
Used by thorns with relevant I/O methods as the point to read in all the grid variables when recovering from checkpoint files.
This timebin exists for scheduling any functions which need to modify grid variables after recovery.
Used by thorns with relevant I/O methods as the point to checkpoint initial data if required.
Used by thorns with relevant I/O methods as the point to checkpoint data during the iterative loop when required.
This timebin is used in mesh refinement settings. It is ignored for unigrid runs. This bin is executed whenever the grid hierarchy is about to change during evolution; compare CCTK_PREREGRIDINITIAL. Routines that decide the new grid structure should be scheduled in this bin.
This timebin is used in mesh refinement settings. It is ignored for unigrid runs. This bin is executed whenever the grid hierarchy or patch setup has changed during evolution; see CCTK_POSTREGRIDINITIAL. It is, e.g. necessary to re-apply the boundary conditions or recalculate the grid points’ coordinates after every changing the grid hierarchy.
The timebin for scheduling any routines which need to be executed before any routines in the main evolution step. This timebin exists for thorn writers convenience, the BEFORE, AFTER, etc., functionality of the schedule.ccl file should allow all functions to be scheduled in the main CCTK_EVOL timebin.
The timebin for the main evolution step.
This timebin is used only in mesh refinement settings. It is ignored for unigrid runs. This bin is executed after each restriction operation during evolution; compare CCTK_POSTRESTRICTINITIAL. It is, e.g. necessary to re-apply the boundary conditions after every restriction operation.
The timebin for scheduling any routines which need to be executed after all the routines in the main evolution step. This timebin exists for thorn writers convenience, the BEFORE, AFTER, etc., functionality of the schedule.ccl file should allow all functions to be scheduled in the main CCTK_EVOL timebin.
The ANALYSIS timebin is special, in that it is closely coupled with output, and routines which are scheduled here are typically only executed if output of analysis variables is required. Routines which perform analysis should be independent of the main evolution loop (that is, it should not matter for the results of a simulation whether routines in this timebin are executed or not).
Called after the main iteration loop when Cactus terminates. Note that sometime, in this timebin, a driver thorn should be destroying the grid hierarchy and removing grid variables.
Cactus final shutdown routines, after the grid hierarchy has been destroyed. Grid variables are no longer available.
The flesh parameters are defined in the file src/param.ccl.
Here, the default value is shown in square brackets, while curly braces show allowed parameter values.
Allow use of GFs from different dimensions [no]
Give only brief output [no]
Give detailed information for each warning statement [yes]
Description of this simulation [""]
Show any registered banners for the different thorns [yes]
Print the scheduling tree to standard output [yes]
Die on parameter errors in CCTK_PARAMCHECK [yes]
Give timing information [off] {off, full}
How to behave when recovering from a checkpoint [strict] {strict, relaxed}
Highlight CCTK warning messages [yes]
Specifies the content and format of CCTK_INFO()/CCTK_VINFO messages. [basic]
{"basic", "numeric time stamp", "human-readable time stamp",
"full time stamp"}
Final time for evolution, overridden by cctk_itlast unless it is positive [-1.0]
Initial time for evolution [0.0]
Final iteration number [10]
Terminate evolution loop after a certain elapsed runtime (in minutes); set to zero to disable this termination condition [0]
The presync_mode parameter defines the behavior of the automatic pre-synchronization of grid functions. A summary of the different modes available is available in Table D5.1.
The meaning of modes is as follows:
: This is the default. Cactus behaves as it did prior to the inclusion of PreSync. READS and WRITES declarations in the schedule have no effect. Synchronization of ghost zones only happens when a SYNC statement is encountered in the schedule.
The same as presync_off, except that now, if the Driver believes that a SYNC is required but not executed, it issues a warning.
In this mode, Cactus tries to honor both SYNC statements in the schedule as well as providing automatic synchronization based on the READS/WRITES declarations. It may, however, issue warnings about possible problems.
In this mode, Cactus tries to honor both SYNC statements in the schedule as well as providing automatic synchronization based on the READS/WRITES declarations. It may, however, issue errors when encountering possible problems.
In this mode, Cactus will only synchronize ghost zones based on READS/WRITES declarations and will ingore SYNC statements in the schedule.
describes what triggers the synchronization of ghost zones for a grid function. “Schedule only,” in this context, means an explicit declaration of SYNC in the schedule. “Driver,” in this context, means that a synchronization is triggered because the schedule requires the variable to be valid everywhere, but it is only valid in the interior. “sync if driver” indicates that a physical boundary condition is registered for the grid function, and thus the driver can update the exterior of the grid function.
describes the condition in which the interior of a grid function contains valid data, but the exterior does not. This will produce a warning in warn-only mode, as it indicates a possibly incorrect synchronization.
describes a situation where a read of the interior is needed (e.g. to perform a synchronization), but (as far as the driver knows) the interior of the grid function is not valid.
describes what the various IO thorns should do if they are asked to write out a grid function if they find invalid data in the interior and/or exterior of a grid function.
refers to the familiar DECLARE_CCTK_ARGUMENTS, which declares all the grid functions visible to a thorn. The DECLARE_CCTK_ARGUMENTS_CHECKED(func_name) macros only declare arguments visible based on the READS/WRITES declarations.
refers to boundary condition update functions registered via Driver_SelectVarForBC or Driver_SelectGroupForBC. Once registered, this function will be called whenever data is needed in the boundary for the grid function or group.
refers to the explicit SYNC declaration in the schedule.ccl.
| presync_mode | Synch triggered by | Can sync | Can’t sync | IO Thorns | Old Macro | Driver BC | Scheduled SYNC | ||||||
| off | schedule only | nothing | nothing | nothing | allowed | ignored | honored | ||||||
| warn-only | schedule only | warn | warn | nothing | allowed | ignored | honored | ||||||
| mixed-warn |
|
| warn |
| allowed | allowed | ignored for driver bc | ||||||
| mixed-error |
|
| error |
| allowed | allowed | ignored for driver bc | ||||||
| presync-only | driver only | driver only | error | error | error | required | ignored | ||||||
Condition on which to terminate evolution loop [iteration] {never, iteration, time, runtime, any, all}
Terminate on next iteration ? [no]
Bitbucket offers a web-based tool for tracking bug reports and feature requests. Cactus bugs and feature requests are handled using the Bitbucket issue tracker at https://bitbucket.org/einsteintoolkit/tickets/. Click on Create to create a new ticket in the system.
Here, we briefly describe the main categories when creating a Cactus problem report.
A brief and informative subject line.
Describe your problem precisely, if you get a core dump, include the stack trace, and if possible give the minimal number of thorns, this problems occurs with. Describe how to reproduce the problem if it is not clear. Note that the description field (and the comments) allow markdown syntax. This means that blocks of code or error messages should be surrounded by 3 backticks ``` …``` in order to avoid the text being interpreted as markdown commands. Click on the question mark link to learn more about the available markdown commands.
Choose bug for cases where there is clearly something wrong and enhancement for a feature request.
Pick whichever level is appropriate. blocker for issues that stop you using the code, critical for very serious problems, major for things which should definitely be addressed, minor for things which would be good to fix but not essential, and trivial for very low priority items. If in doubt, choose either major or minor.
Use Cactus for problems related to the Cactus flesh or one of the thorns in one of the Cactus arrangements (those in arrangements with names starting “Cactus”).
This is used by the maintainers to indicate an intention to fix the problem before a particular release of Cactus.
The Cactus release you are using. You can find this out, for example, from an executable by typing cactus_<config> -v.
There is no explicit field to add keywords. It is however a good idea to add a line ”Keyword: keyword1 keyword2” at the end to the Description to indicate that a backport to the release version is required. For example, you could also enter the thorn name if the problem is with a specific thorn, the keyword testsuite if the ticket is related to a test failure, or the keyword documentation if the problem is related to the documentation.
Finding your way around in the Cactus structure can be pretty difficult to handle. To make life easier there is support for tags, which lets you browse the code easily from within Emacs/XEmacs or vi. A tags database can be generated with gmake:
The command gmake TAGS will create a database for a routine reference table to be used within Emacs. This
database can be accessed within Emacs if you add either of the following lines to your .emacs
file:
(setq tags-file-name "CACTUS_HOME/TAGS") XOR
(setq tag-table-alist ’(("CACTUS_HOME" . "CACTUS_HOME/TAGS")))
where CACTUS_HOME is your Cactus directory.
You can now easily navigate your Cactus flesh and Toolkits by searching for functions or “tags”:
Alt. will find a tag
Alt, will find the next matching tag
Alt* will go back to the last matched tag
If you add the following lines to your .emacs file, the files found with tags will opened in read-only mode:
(defun find-tag-readonly (&rest a) (interactive) (call-interactively ‘find-tag a) (if (eq nil buffer-read-only) (setq buffer-read-only t)) ) (defun find-tag-readonly-next (&rest a) (interactive) (call-interactively ‘tags-loop-continue a) (if (eq nil buffer-read-only) (setq buffer-read-only t)) ) (global-set-key [(control meta \.)] ’find-tag-readonly) (global-set-key [(control meta \,)] ’find-tag-readonly-next)
The key strokes to use when you want to browse in read-only mode are:
CTRL Alt. will find a tag and open the file in read-only mode
CTRL Alt, will find the next matching tag in read-only mode
The commands available are highly dependent upon the version of vi, but the following is a selection of commands which may work.
vi -t tag Start vi and position the cursor at the file and line where ‘tag’ is defined.
Control-] Find the tag under the cursor.
:ta tag Find a tag.
:tnext Find the next matching tag.
:pop Return to previous location before jump to tag.
Control-T Return to previous location before jump to tag (not widely implemented).
Note: Currently some of the CCTK_FILEVERSION() macros at the top of every source file don’t have a trailing semicolon, which confuses the etags and ctags programs, so tags does not find the first subroutine in any file with this problem.