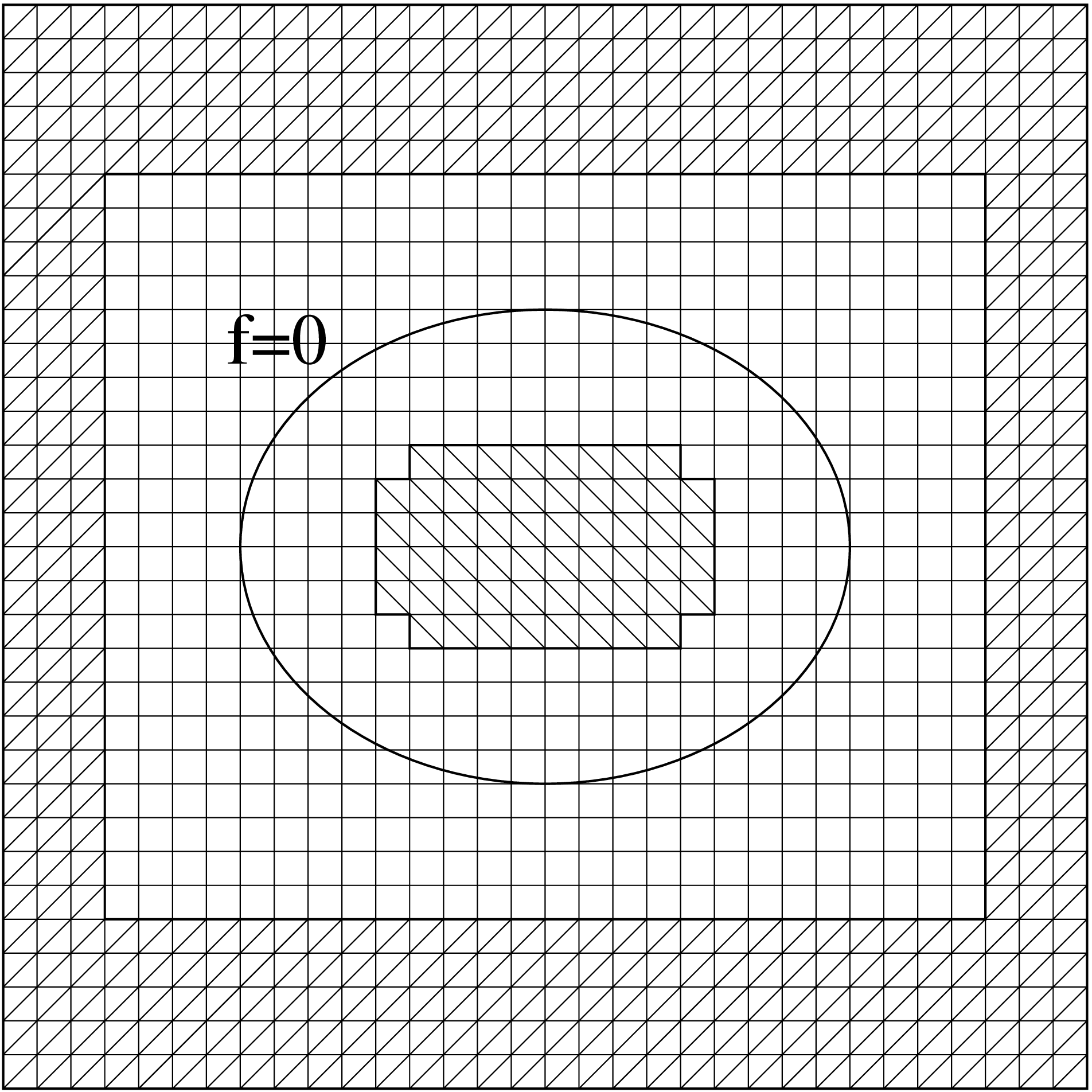
Figure 1: Illustration of the excision regions used internally by EHFinder. The hashed regions are excised.
This thorn locates the Event Horizon (EH) in an analytic or numerical spacetime by evolving a null surface backwards in time. The null surface is described at each time step as the 0-level iso-surface of a 3D scalar function \(f\). This level set description of the surface allows, trivially, changes of the topology of the surface so it is possible to follow the merger of two (or more) black holes into a final black hole.
This thorn attempts to locate the Event Horizon (EH) in an analytic or numerical spacetime by evolving a null surface backwards in time. This method depends on the fact that, except in cases where the coordinates are adapted to outgoing null geodesics, an outgoing null surface started close to the EH, when evolved forward in time, is diverging exponentially from the EH. Reversing the time evolution then means that an outgoing null surface will converge exponentially to the EH. The level set function, \(f\), is evolved according to
where in the second equation the lapse, shift and 3-metric has been substituted for the 4-metric. For more details on the theory and implementation see [1].
This thorn uses a level set description of the null surface, i.e.the surface is the 0-level isosurface of a 3D scalar function, \(f\), that is negative inside and positive outside the surface. With this choice of surface description one level-set function can describe multiple surfaces at the same time, simply by having several, disconnected regions with negative values. The biggest advantage, however, is that any change of topology of the surface is handled naturally and simply by the level-set function changing sign. Therefore this EHFinder can follow the EH during the merger of two (or more) black holes into one black hole.
To find the EH in a numerical spacetime several points have to be taken into consideration. Since the null surface has to be evolved backwards in time, the EHFinder has to be seen as a pre-processing analysis thorn. Therefore it is necessary to evolve the initial data forward in time while outputting enough 3D data, that the full 4-metric can be recovered at each timestep. The 3D data is then read back in, in reverse order, while the level-set function is evolved backwards in time. The thorn can evolve more than one level set function at a time using different initial guesses for the surfaces (NOTE: this is a quite recent feature and has not yet been tested extensively). More details about the actual use of the thorn in section 7
The evolution equation for \(f\), equation (??), causes steepening of the gradient of \(f\), which is undesireble numerically. For that reason, \(f\) is periodically re-initialized to a distance function. That is, the values of \(f\) are changed so that the the value of \(f\) in a grid point is equal to the (signed) distance from the grid point to the surface \(f=0\). This is done by evolving \(f\) according to the following evolution equation (in the parameter \(\lambda \)) \begin {equation} \frac {df}{d\lambda } = -\frac {f}{\sqrt {f^{2}+1}}\left (|\nabla f|-1\right ) \label {AEIThorns_EHFinder_reinit} \end {equation} until a steady state is achieved. This method is called the pde-method since it is basically evolving a pde. Sometimes the \(f=0\) surface can be moved slightly during the re-initialization procedure. This happens when the surface develops a narrow neck just before a topology change. For that reason, there is an option to detect when this is about to happen and undo the re-initialization.
There used to be another method doing the re-initialization, but it proved inferior to the pde-method and was removed. Other methods may be implemented in the future.
Currently three different choices for the initial shape of the surface are implemented. The simplest choice is a sphere in which case \(f\) is set according to \begin {equation} f = \sqrt {(x-x_{0})^2+(y-y_{0})^2+(z-z_{0})^2} - r_{0}, \label {AEIThorns_EHFinder_sphere} \end {equation} where \(r_{0}\) is the radius of the sphere and \(x_{0}\), \(y_{0}\) and \(z_{0}\) are the coordinates of the center of the sphere. The second choice is a rotated and translated ellipsoid. The basic equation is here \begin {equation} f = \sqrt {\frac {x^{2}}{a^{2}}+\frac {y^{2}}{b^{2}}+\frac {z^{2}}{c^{2}}} - 1 \label {AEIThorns_EHFinder_ellipsoid} \end {equation} This ellipsoid is first rotated an angle \(\alpha \) around the \(z\)-axis, then rotated an angle \(\beta \) around the \(y\)-axis, then rotated an angle \(\gamma \) around the \(x\)-axis and finally the rotated ellipsoid is translated to have its “center” at the point \((x_{0},y_{0},z_{0})\). The final possible shape of the initial surface is an ovaloid of Cassini. This was implented initially to test changing the topology in flat space. it is most likely not useful for numerical data. In this case \(f\) is set according to \begin {equation} f = (x^{2}+y^{2}+z^{2})^{2} + a^{4} - 2 a^{2} (x^{2}-y^{2}-z^{2})-b^{4}. \label {AEIThorns_EHFinder_cassini} \end {equation} There are no translation or rotations implemented for the ovaloid of Cassini.
Different initial shapes can be used for the different level set functions used in the same run.
Even though the level set function, \(f\), in principle can be defined everywhere it is often advantageous to only evolve it in a certain region around the surface \(f=0\). Since \(f\) is re-initialized regularly to become a distance function, \(f\) itself can be used as a measure of the distance from a certain grid point to the surface \(f=0\). The parameter ehfinder::shell_width specifies the size of the active region around \(f=0\). However the interior and exterior excisions are handled differently. The interior excision is most simple, since here all grid points with \(f<-{\mbox {\tt ehfinder::shell\_width}}\) are marked as inactive. This should work in all cases when the excised region is everywhere concave, since then all points on the boundary of the excised region will have enough neighbouring active points to be able to calculate second order accurate one sided derivatives. If the interior excised region happens to have a convex region, this might fail. To avoid a similiar problem at the outer excised boundary, this boundary is shaped as a rectangular box. The box is chosen so that all points with \(f<{\mbox {\tt ehfinder::shell\_width}}\) are in the active region. This is illustrated in Figure 1, for the case
ehfinder::shell_width = 4, where the excised regions are hashed.
Changes to the excision regions are only done after re-initialization, since it is only at this time that \(f\) is a distance function. The excision regions can move across the grid, tracking the surface \(f=0\).
Also if the numerical run was done with excision using SpaceMask, the EHFinder excision region is guaranteed to completely cover the numerical excision region. The EHFinder currently only supports the old style excision mask but the support of the new style excision mask should be trivial and fast to implement.
All finite differences used in the evolution of the null surface are second order one sided differences. For that reason a ghost_size larger or equal to 2 should always be used. It is possible to choose between three different upwinding schemes. This is done by setting the parameter ehfinder::upwind_type to either intrinsic, shift or characteristic.
The intrinsic scheme, looks at the values of \(f\) itself, to determine the direction of the stencil. This is basically in order to be able to handle situations like the one illustrated in 1D in Figure 2.
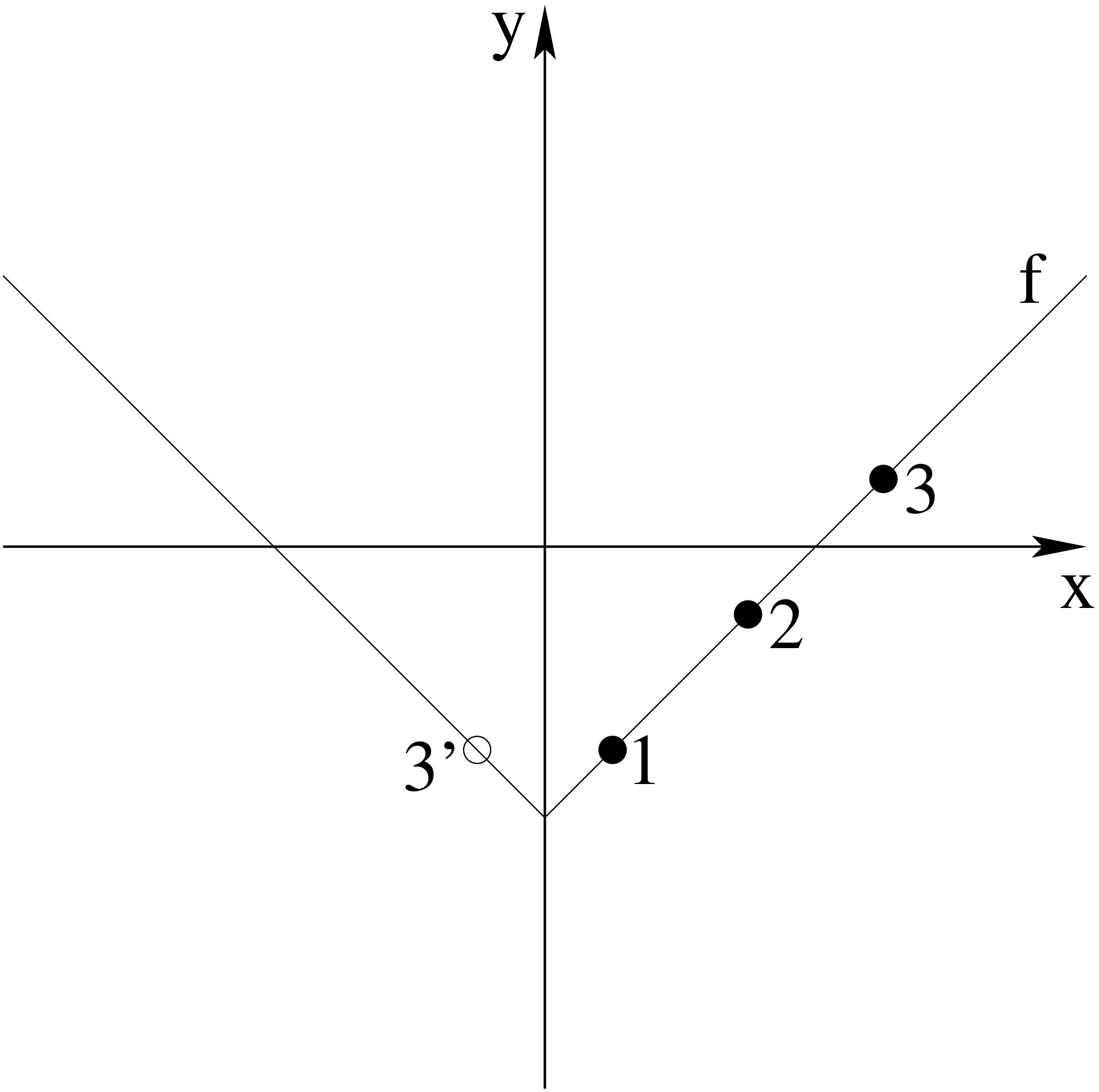
If the stencil for calculating derivatives in the point labeled 1 is taken to consist of the points 1, 2 and 3’, the non differentiablility of \(f\) may cause problems. The algorithm detects this and instead uses the points 1, 2, 3 as the stencil. This ensures that a non differentiable feature can be maintained in the evolution.
However this scheme only works in a few simple cases. For more general cases it is important to use characteristic information in order to ensure that the numerical stencil contains the domain of dependence. Therefore the characteristic scheme was introduced. Fortunately, by using the information contained in the level set functions the characteristic of the level set function can be calculated using \begin {equation} \frac {dx^{i}}{dt}=-\beta ^{i}+\frac {\alpha ^{2}\gamma ^{ij}\partial _{j}f} {\sqrt {\alpha ^{2}\gamma ^{kl}\partial _{k}f\partial _{l}f}}. \label {eq:char} \end {equation} The method estimates the characteristic direction using centered finite differences in equation (5) and then recalculates the one sided finite differences in the appropriate direction.
It might happen that the upwinding direction based on the characteristic direction results in the stencil to consist of the points 1, 2, 3’ in Figure 2. However, if the re-initialization is done often enough, this turns out not to cause any problems.
The shift scheme was implemented as an improvement to the intrinsic scheme but it turned out that the characteristic scheme was superior. Therefore shift upwinding should not be used. It might be completely removed in future revisions.
For the re-initialization the default is to use the intrinsic second order scheme (the re-initialization doesn’t depend on where the surface is moving), so characteristic upwinding is not applicable. It is possible to use a first order intrinsic scheme, but this is, in my experience, not accurate enough. A centered differencing scheme is also available, but is only there for testing purposes and should never be used. These alternative schemes will probably be removed in the future.
Here the most important parameters are described.
ehfinder::mode
The mode can either be set to normal (normal event horizon finder mode), analysis (compare a
previously calculated level set function to a small number of analytic spacetimes) and generator
(only evolve the generators while keeping the level set function fixed). The default is normal
and should normally not be changed. The other modes are only useful for debugging and testing
purposes.
ehfinder::eh_number_level_sets
An integer parameter specifying how many individual level set functions to evolve at a time.
Currently it has to be between 1 and 10.
ehfinder::eh_metric_type
The metric type can either be set to numerical or analytic. If it is set to numerical the EHFinder
will attempt to read in the metric from files in the directory specified by the io::recover_dir
parameter. At present all the timesteps has to be saved in the same file. Note that if the numerical
data was produced with admbase::metric_type = "static conformal" this parameter has to be
specified again. In this case the EHFinder will attempt to also read in the conformal factor from
a file. If metric type is set to analytic another thorn needs to set up the metric. It is possible to
only set the metric on the initial slice, but it is also possible to have a thorn (like thorn Exact) set
the metric at CCTK_PRESTEP if the analytic metric is time dependent. The default is numerical.
ehfinder::eh_lapse_type
The same for the lapse.
ehfinder::eh_shift_type
The same for the shift.
initial_f[i]
A vector parameter specifying the initial shape of the null surface for the individual level set
functions. The initial shape can currently be chosen from sphere, ellipsoid and cassini as
described in section 3. The default is sphere.
initial_rad[i]
A vector parameter specifying the radius of the initial sphere (\(r_{0}\) in equation 2). The deafault is 1.
translate_x[i]
A vector parameter specifying how much to translate the initial surface in the \(x\)-direction (\(x_{0}\) in
equation 2). Also used for the initial ellipsoid. The default is 0.
translate_y[i]
A vector parameter specifying how much to translate the initial surface in the \(y\)-direction (\(y_{0}\) in
equation 2). Also used for the initial ellipsoid. The default is 0.
translate_z[i]
A vector parameter specifying how much to translate the initial surface in the \(z\)-direction (\(z_{0}\) in
equation 2). Also used for the initial ellipsoid. The default is 0.
initial_a[i]
A vector parameter specifying \(a\) in equation 3. The default is 1.
initial_b[i]
A vector parameter specifying \(b\) in equation 3. The default is 1.
initial_c[i]
A vector parameter specifying \(c\) in equation 3. The default is 1.
rotation_alpha[i]
A vector parameter specifying the rotation angle \(\alpha \) for the ellipsoid around the \(z\)-axis. The default is
0.
rotation_beta[i]
A vector parameter specifying the rotation angle \(\beta \) for the ellipsoid around the \(y\)-axis. The default is
0.
rotation_gamma[i]
A vector parameter specifying the rotation angle \(\gamma \) for the ellipsoid around the \(x\)-axis. The default is
0.
shell_width
The width of the active evolution region. Grid points more than shell_width gridspacings away
from the \(f=0\) surface are marked as inactive and are not evolved as described in section 4. The default
is \(7\) gridspacings.
use_inner_excision
A boolean parameter specifying whether the interior excision should be used or not.
use_outer_excision
A boolean parameter specifying whether the exterior excision should be used or not.
upwind_type
The type of upwinding to be used (either intrinsic, shift or characteristic). See the detailed
description of the upwinding types in section 5. The default is characteristic.
surface_direction
The code can track both outgoing and ingoing null surfaces. Choose the direction by using outward
or inward. The default is outward. Note that the code only works as an event horizon finder when
evolving outward going null surfaces backwards in time.
re_init_undo
Should the re-initialization be undone just before pinch-off or not as described in section 2. The
default is "no".
re_init_int_method
Choose the integration method in the pde-re-initialization method. Choose either a simple Euler
(euler) integration scheme or a second order Runge-Kutta (rk2) scheme. Since a pde is evolved
to steady state, it seems that the Euler scheme works just fine and is faster than the Runge-Kutta
scheme. The default is euler.
re_init_max_iter
The maximum number of iterations in the pde-re-initialization scheme, before giving up. Unless
you are working at high resolution the default should be enough. The default is 800.
pde_differences
Choose the type of finite differencing used in the pde re-initialization. Don’t ever use anything else
than second order upwinding (upwind2). The other choices (centered and upwind) are there only
for testing purposes and might be removed.
re_initialize_every
How often to re-initialize using the pde re-initialization. This depends on the problem. For some
problems it is necessary to do it more often than for other problems. You’ll have to experiment to
figure out what works best. The default is 10.
last_iteration_number
The last iteration number of the numerical simulation that produced the metric data. Active when
eh_metric_type is equal to numerical.
saved_iteration_every
How often was the numerical data saved? This and the above parameter is used in the code to
figure out which data set iteration number to read in from file
(last_iteration_number-saved_iteration_every*cctk_iteration).
ntheta
How many points in the \(\theta \)-direction should be used for integrations over the surface.
nphi
How many points in the \(\phi \)-direction should be used for integrations over the surface.
maximum_surface_number
The maximal number of surfaces expected at any given time during the whole evolution.
surface_interpolator
Which interpolator to use for the location of points on the surface. It should be the name of a
valid interpolator provided by one of the available interpolators. The interpolator should be able to
return both the interpolated value and derivatives. At present this is provided by AEILocalInterp.
The default is Hermite polynomial interpolation.
surface_interpolation_order
The interpolation order used for finding points on the surface. Higher orders require larger number
of ghost zones for parallel runs. The default value is 2 (consistent with a ghostsize of 2).
area_interpolator
Which interpolator should be used to interpolate metric information onto the surface once the
surface points have been found. The default is Lagrange polynomial interpolation.
area_interpolation_order
The interpolation order used for calculating the area of the surface. The default value is 3 (consistent
with a ghostsize of 2).
EHFinder also extends the following parameter from admbase in order to be able to read in initial data.
admbase::initial_data is extended with "read from file".
admbase::initial_lapse is extended with "read from file".
admbase::initial_shift is extended with "read from file".
In this section I will try to describe in little more detail how EHFinder can be used to find the EH in a numerical spacetime.
The first thing to make sure, is that enough data is output during the numerical run, to be able to reconstruct the full 4-metric. The required output therefore consists of the ADMBase::metric, ADMBase::lapse and ADMBase::shift. However if the evolution was done with zero shift and/or lapse equal to one, it is not necessary to output these grid functions, as long as storage is turned on and they are set to the correct value initially when EHFinder is run. If the evolution was done with a conformal factor then StaticConformal::psi has to be output as well, since it is necessary in order to reconstruct the 4-metric. However it is only necessary to output this once since it is constant during the evolution. It is not necessary to output the derivatives of the conformal factor. If excision was used in the numerical run then it is also necessary to output SpaceMask::emask1 , since EHFinder has to make sure that its internal mask covers the space mask.
At present it is necessary to output all timesteps into the same file (use IO::out_timesteps_per_file = -1, which is the default). In principle both FLEXIO and HDF5 output should be supported, but only HDF5 output has been tested. Since EHFinder can be run on a lot less processors compared to the spacetime evolution, it is often advantageous to either do unchuncked output or to recombine the output files, since it is then possible to read the data onto a smaller number of processors (use IO::out_unchunked = "yes" to write unchunked data). If the numerical run is larger than the EH containing region (hopefully that is the case; otherwise the boundaries are definitely to close in), it is possible to use hyperslabbing to just output the EH containing region (see for example CactusPUGHIO/IOHDF5 for details on this). If hyperslabbing is used it is definitely necessary to do the output unchunked or recombine afterwards. An example parameter file can be seen in the par/Misner_2.2_80_3D.par.
In principle EHFinder should also work for downsampled (in both space and time) data, but no experiments have been done so far to estimate the loss of accuracy (I have always used the full resolution and done output at every timestep).
If hyperslabbing and/or downsampling is used, it is the users responsibility (by specifying the right parameters in the parameter file) to ensure that EHFinder is run with the correct grid spacing and time step.
EHFinder is still under development and testing and can as yet not be used as a black box. But still I can give some guidelines and advice on how to proceed.
The first concern is to setup the initial guess for the surface. Ideally one would like to use at least two different initial surfaces. One surface completely inside the EH and one surface completely outside the EH. In practice it is often a good idea to use more than two different initial surfaces, since then the initial surfaces closest to the EH can be identified. Using the feature of evolving multiple level set functions at a time, this can be done while reading in the numerical data only once. The easiest way to get an initial surface inside the EH, is to set up the initial guess to be completely inside the apparent horizon (AH). To get an initial guess that is outside of the EH is not as easy. One way is to choose a surface, that starts to contract everywhere when evolved according to equation (??). However this is not a guarantee, since the EH can be expanding in the numerical coordinates. This of course means that it is necessary to do it by trial and error. Set up some initial guess evolve it for a little while, look at 3D output to determine if the surface is contracting everywhere and change the initial surface if necessary.
Then comes the question of how often to do the re-initialization and how much to excise. These parameters depend on the numerical data. In principle, since the re-initialization can move the surface, one wants to do it as rarely as possible. On the other hand, re-initialization is necessary in order to keep the evolution nicely controlled (by avoiding large gradients), so a compromise has to be found. This might require some experimentation. Because movements of the surface during re-initialization, usually only occurs close to moments of topology change, it might be necessary to evolve all the way beyond the change of topology and look at 3D output to see if any problems occured. If significant movement of the surface during re-initialization near the change of topology is observed, then try again with re-initialization undo activated. How often to do the re-initialization also depends on the width of the active region. If the active region around the surface is narrow, it might be necessary to re-initialize more often, since in this case the boundaries of the active region is closer to the surface. At the boundaries the stencil direction is dictated by the geometry and not \(f\) itself or the characteristics, which might cause instabilities if it is not re-initialized. Good values guesses for ehfinder::reinitialize_every_pde seems to in the range 5–10 at low or medium resolutions but can usually be increased for higher resolutions. For ehfinder::shell_width I normally use at least 7.
EHFinder does not yet work fully with the fixed mesh refinement driver Carpet, but this is under development. Currently the evolution of the level set function and the re-initialization works, but only with no inner and outer excision. The analysis routines to find areas of the surfaces does not work with Carpet. Reading in metric data has not been tested with Carpet.
This documentation will be updated, as input comes in from users.
Happy event horizon finding.
[1] Diener P., 2003, 2003, Classical and Quantum Gravity, 20, 4901–4917, A New General Purpose Event Horizon Finder for 3D Numerical Spacetimes, gr-qc/0305039
| area_calculation_method | Scope: private | KEYWORD |
| Description: How should the areas be calculated
| ||
| Range | Default: standard | |
| standard | Using a angular coordinate system on the surface
| |
| isosurface | Using an isosurface triangulation
| |
| area_interpolation_order | Scope: private | INT |
| Description: What order should be used for the area interpoation
| ||
| Range | Default: 3 | |
| 1:* | A valid positive interpolation order
| |
| area_interpolator | Scope: private | STRING |
| Description: What interpolator should be used for the area
| ||
| Range | Default: Lagrange polynomial interpolation | |
| .+ | A valid interpolator name
| |
| cas_a | Scope: private | REAL |
| Description: Initial a coefficient of ovaloid of cassini
| ||
| Range | Default: 2.0 | |
| : | Any number (negative and positive are equivalent)
| |
| cas_b | Scope: private | REAL |
| Description: Initial b coefficient of ovaloid of cassini
| ||
| Range | Default: 2.05 | |
| : | Any number (negative and positive are equivalent)
| |
| center_x | Scope: private | REAL |
| Description: The x-coordinate of the center
| ||
| Range | Default: 0.0 | |
| *:* | Anything
| |
| center_y | Scope: private | REAL |
| Description: The y-coordinate of the center
| ||
| Range | Default: 0.0 | |
| *:* | Anything
| |
| center_z | Scope: private | REAL |
| Description: The z-coordinate of the center
| ||
| Range | Default: 0.0 | |
| *:* | Anything
| |
| cheat | Scope: private | BOOLEAN |
| Description: Should we cheat and evolve using the last data set for a while?
| ||
| Default: no | ||
| cheat_iterations | Scope: private | INT |
| Description: For how many iterations should we cheat
| ||
| Range | Default: (none) | |
| 0:* | If you really want to cheat this should be positive
| |
| eh_lapse_type | Scope: private | KEYWORD |
| Description: Do we use numerical or analytic metric information
| ||
| Range | Default: numerical | |
| numerical | Read in metric from numerical data
| |
| analytic | Use external analytic metric
| |
| eh_metric_type | Scope: private | KEYWORD |
| Description: Do we use numerical or analytic metric information
| ||
| Range | Default: numerical | |
| numerical | Read in metric from numerical data
| |
| analytic | Use external analytic metric
| |
| eh_number_level_sets | Scope: private | INT |
| Description: How many level set functions should we evolve
| ||
| Range | Default: 1 | |
| 1:10 | Between 1 and 10
| |
| eh_shift_type | Scope: private | KEYWORD |
| Description: Do we use numerical or analytic metric information
| ||
| Range | Default: numerical | |
| numerical | Read in metric from numerical data
| |
| analytic | Use external analytic metric
| |
| evolve_generators | Scope: private | BOOLEAN |
| Description: Should the generators be evolved
| ||
| Default: no | ||
| file_type | Scope: private | KEYWORD |
| Description: Are the timesteps in separate files or in one file?
| ||
| Range | Default: one_file | |
| one_file | All timesteps are in the same file
| |
| sep_time_files | Timesteps are in separete files
| |
| generator_distribution | Scope: private | KEYWORD |
| Description: What initial distribution should be used
| ||
| Range | Default: line | |
| line | Put the generators on a line in the xz-plane
| |
| 2D array | Put the generators on a surface with spherical topology
| |
| generator_interpolation_order | Scope: private | INT |
| Description: What order should be used for the generator interpoation
| ||
| Range | Default: 3 | |
| 1:* | A valid positive interpolation order
| |
| generator_interpolator | Scope: private | STRING |
| Description: What interpolator should be used for the generators
| ||
| Range | Default: Lagrange polynomial interpolation | |
| .+ | A valid interpolator name
| |
| generator_tracking_method | Scope: private | KEYWORD |
| Description: What method should be used for tracking the generators
| ||
| Range | Default: interpolate_before | |
| interpolate_before | Interpolate first, then calculate
| |
| interpolate_after | Calculate first, then interpolate
| |
| initial_a | Scope: private | REAL |
| Description: Initial a coefficient of ellipsoid
| ||
| Range | Default: 1.0 | |
| 0.0: | Positive please
| |
| initial_b | Scope: private | REAL |
| Description: Initial b coefficient of ellipsoid
| ||
| Range | Default: 1.0 | |
| 0.0: | Positive please
| |
| initial_c | Scope: private | REAL |
| Description: Initial c coefficient of ellipsoid
| ||
| Range | Default: 1.0 | |
| 0.0: | Positive please
| |
| initial_f | Scope: private | KEYWORD |
| Description: Initial surface choice
| ||
| Range | Default: sphere | |
| sphere | spherical surface
| |
| ellipsoid | ellipsoidal surface
| |
| cassini | ovaloid of cassini
| |
| initial_rad | Scope: private | REAL |
| Description: Initial radius of surface
| ||
| Range | Default: 1.0 | |
| 0.0: | Positive please
| |
| last_iteration_number | Scope: private | INT |
| Description: The starting iteration number for the EH_Finder (last iteration number of the
simulation)
| ||
| Range | Default: (none) | |
| 0: | Positive please
| |
| maximum_surface_number | Scope: private | INT |
| Description: The maximum number of surfaces expected in the data
| ||
| Range | Default: 1 | |
| 1:* | Positive please
| |
| mode | Scope: private | KEYWORD |
| Description: Mode of operation
| ||
| Range | Default: normal | |
| normal | Find event horizons
| |
| analysis | Provide storage for f without evolving
| |
| generator | Provide storage for f and initialize without evolving
| |
| n_array_ghosts | Scope: private | INT |
| Description: Number of ghost points in the surface grid array
| ||
| Range | Default: 1 | |
| 1: | Positive please
| |
| nphi | Scope: private | INT |
| Description: Number of points in the phi direction when finding points on the surface
| ||
| Range | Default: 51 | |
| 1:*:2 | Positive and odd please
| |
| ntheta | Scope: private | INT |
| Description: Number of points in the theta direction when finding points on the surface
| ||
| Range | Default: 51 | |
| 1:*:2 | Positive and odd please
| |
| number_of_generators | Scope: private | INT |
| Description: How many generators should be evolved
| ||
| Range | Default: 1 | |
| 1:* | Postive please
| |
| number_of_generators_phi | Scope: private | INT |
| Description: How many generators in the phi direction
| ||
| Range | Default: 1 | |
| 1:* | Positive please
| |
| number_of_generators_theta | Scope: private | INT |
| Description: How many generators in the theta direction
| ||
| Range | Default: 1 | |
| 1:* | Positive please
| |
| pde_differences | Scope: private | KEYWORD |
| Description: Type of finite diffencing used in pde re-initialization
| ||
| Range | Default: upwind2 | |
| centered | Use 2nd order centered differences except at the boundaries
| |
| upwind | Use 1st order upwinded differences everywhere
| |
| upwind2 | Use 2nd order upwinded differences everywhere
| |
| re_init_int_method | Scope: private | KEYWORD |
| Description: Integration method used in re-initialization
| ||
| Range | Default: euler | |
| euler | Standard euler scheme
| |
| rk2 | Second order Runge-Kutta scheme
| |
| re_init_max_iter | Scope: private | INT |
| Description: maximum number of iterations in the re-initialization
| ||
| Range | Default: 800 | |
| 0: | Positive please
| |
| re_init_undo | Scope: private | BOOLEAN |
| Description: Should re-initialization be undone at pinch-off
| ||
| Default: yes | ||
| re_init_verbose | Scope: private | BOOLEAN |
| Description: Should re-initialization be verbose?
| ||
| Default: no | ||
| re_initialize_every | Scope: private | INT |
| Description: How often to re-initialize the level set function
| ||
| Range | Default: 10 | |
| 0: | If 0 don’t re-initialize
| |
| read_conformal_factor_once | Scope: private | BOOLEAN |
| Description: Should the conformal factor only be read once
| ||
| Default: yes | ||
| rotation_alpha | Scope: private | REAL |
| Description: Rotation angle around z-axis of ellipsoid
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| rotation_beta | Scope: private | REAL |
| Description: Rotation angle around y-axis of ellipsoid
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| rotation_gamma | Scope: private | REAL |
| Description: Rotation angle around x-axis of ellipsoid
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| saved_iteration_every | Scope: private | INT |
| Description: How often was the numerical data saved
| ||
| Range | Default: 1 | |
| 1: | Positive please
| |
| shell_width | Scope: private | REAL |
| Description: Width of the evolution region in units of the grid spacing
| ||
| Range | Default: 7.0 | |
| 0.0: | Positive please
| |
| surface_direction | Scope: private | KEYWORD |
| Description: Should we track outward or inward moving surfaces
| ||
| Range | Default: outward | |
| outward | Track outward moving surfaces. Use for event horizon finding.
| |
| inward | Track inward moving surfaces.
| |
| surface_interpolation_order | Scope: private | INT |
| Description: What order should be used for the surface interpoation
| ||
| Range | Default: 2 | |
| 1:* | A valid positive interpolation order
| |
| surface_interpolator | Scope: private | STRING |
| Description: What interpolator should be used to locate the surface
| ||
| Range | Default: Hermite polynomial interpolation | |
| .+ | A valid interpolator name
| |
| translate_x | Scope: private | REAL |
| Description: Translation in x-direction
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| translate_y | Scope: private | REAL |
| Description: Translation in y-direction
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| translate_z | Scope: private | REAL |
| Description: Translation in z-direction
| ||
| Range | Default: 0.0 | |
| *:* | Everything is possible
| |
| upwind_type | Scope: private | KEYWORD |
| Description: Type of upwinding used in evolving the ehfinder equations
| ||
| Range | Default: characteristic | |
| intrinsic | Use the values of f itself to determine upwind direction
| |
| shift | Use the shift to determine upwind direction
| |
| characteristic | Use characteristic information
| |
| use_inner_excision | Scope: private | BOOLEAN |
| Description: Should inner excision be used?
| ||
| Default: yes | ||
| use_outer_excision | Scope: private | BOOLEAN |
| Description: Should outer excision be used?
| ||
| Default: yes | ||
| use_user_center | Scope: private | BOOLEAN |
| Description: Should the user prescribed center be used
| ||
| Default: no | ||
| ehfinder_max_evolved_array_size | Scope: restricted | INT |
| Description: The maximum size of evolved grid arrays used by EHFinder
| ||
| Range | Default: 1 | |
| 1:* | The size of the generator grid arrays
| |
| ehfinder_maxnumevolvedvars | Scope: restricted | INT |
| Description: The maximum number of evolved variables used by EHFinder
| ||
| Range | Default: 1 | |
| 1:10 | Only evolve the level set functions
| |
| ehfinder_num_arrayevolved_vars | Scope: restricted | INT |
| Description: The maximum number of evolved grid arrays used by EHFinder
| ||
| Range | Default: 3 | |
| 0:30 | Should be exactly zero or a multiple of three
| |
| use_mask | Scope: shared from SPACEMASK | BOOLEAN |
Implements:
ehfinder
Inherits:
grid
admbase
coordgauge
staticconformal
spacemask
boundary
| Group Names | Variable Names | Details | |
| f | f | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| sf | sf | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dfx | dfx | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dfy | dfy | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dfz | dfz | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dfsq | dfsq | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| Group Names | Variable Names | Details | |
| ftmp | ftmp | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| sftmp | sftmp | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| fbak | fbak | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| g3inv | compact | 0 | |
| g3xx | description | The inverse of the 3-metric | |
| g3xy | dimensions | 3 | |
| g3xz | distribution | DEFAULT | |
| g3yy | group type | GF | |
| g3yz | tags | tensortypealias=”Scalar” Prolongation=”None” | |
| g3zz | timelevels | 1 | |
| variable type | REAL | ||
| eh_mask | eh_mask | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | INT | ||
| tm_mask | tm_mask | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | INT | ||
| Group Names | Variable Names | Details | |
| eh_mask_bak | eh_mask_bak | compact | 0 |
| dimensions | 3 | ||
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | INT | ||
| re_init_control | re_init_control | compact | 0 |
| dimensions | 0 | ||
| distribution | CONSTANT | ||
| group type | SCALAR | ||
| timelevels | 1 | ||
| variable type | INT | ||
| niter_reinit | niter_reinit | compact | 0 |
| dimensions | 0 | ||
| distribution | CONSTANT | ||
| group type | SCALAR | ||
| timelevels | 1 | ||
| variable type | INT | ||
| surface_index | compact | 0 | |
| sc | dimensions | 3 | |
| distribution | DEFAULT | ||
| group type | GF | ||
| tags | tensortypealias=”Scalar” Prolongation=”None” | ||
| timelevels | 1 | ||
| variable type | REAL | ||
| find_surface_status | find_surface_status | compact | 0 |
| dimensions | 0 | ||
| distribution | CONSTANT | ||
| group type | SCALAR | ||
| timelevels | 1 | ||
| variable type | INT | ||
| levelset_integers | compact | 0 | |
| levelset_counter | description | Integer variables used to loop over the level sets | |
| more_levelsets | dimensions | 0 | |
| distribution | CONSTANT | ||
| group type | SCALAR | ||
| timelevels | 1 | ||
| variable type | INT | ||
| Group Names | Variable Names | Details | |
| surface_integers | compact | 0 | |
| surface_counter | description | Integer variables used in surface integration | |
| points_counter | dimensions | 0 | |
| more_surfaces | distribution | CONSTANT | |
| more_points | group type | SCALAR | |
| integrate_counter | timelevels | 1 | |
| variable type | INT | ||
| surface_reals | compact | 0 | |
| sym_factor | description | Real variables used in surface integration | |
| theta_sym_factor | dimensions | 0 | |
| phi_sym_factor | distribution | CONSTANT | |
| group type | SCALAR | ||
| timelevels | 1 | ||
| variable type | REAL | ||
| surface_arrays | compact | 0 | |
| ctheta | description | Grid arrays for points on the surface | |
| cphi | dimensions | 2 | |
| rsurf | distribution | DEFAULT | |
| sintheta | ghostsize | N_ARRAY_GHOSTS | |
| ghostsize | N_ARRAY_GHOSTS | ||
| costheta | group type | ARRAY | |
| sinphi | size | NTHETA | |
| size | NPHI | ||
| cosphi | timelevels | 1 | |
| drdtheta | variable type | REAL | |
| surface_tmp_arrays | compact | 0 | |
| drsurf | description | Temporary grid arrays for finding points on the surface | |
| interp_x | dimensions | 2 | |
| interp_y | distribution | DEFAULT | |
| interp_z | ghostsize | N_ARRAY_GHOSTS | |
| ghostsize | N_ARRAY_GHOSTS | ||
| f_interp | group type | ARRAY | |
| dfdx_interp | size | NTHETA | |
| size | NPHI | ||
| dfdy_interp | timelevels | 1 | |
| dfdz_interp | variable type | REAL | |
| center_arrays | compact | 0 | |
| center | description | The cartesian location of the center for the spherical coordinate system | |
| dimensions | 1 | ||
| distribution | CONSTANT | ||
| group type | ARRAY | ||
| size | 3 | ||
| timelevels | 1 | ||
| variable type | REAL | ||
| surface_int_array | compact | 0 | |
| n_since_last_reduction | description | Temporary integer grid array for finding points on the surface | |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | N_ARRAY_GHOSTS | ||
| ghostsize | N_ARRAY_GHOSTS | ||
| group type | ARRAY | ||
| size | NTHETA | ||
| size | NPHI | ||
| timelevels | 1 | ||
| variable type | INT | ||
| Group Names | Variable Names | Details | |
| interp_metric_arrays | compact | 0 | |
| gxxi | description | Arrays for holding the interpolated metric and conformal factor | |
| gxyi | dimensions | 2 | |
| gxzi | distribution | DEFAULT | |
| gyyi | ghostsize | N_ARRAY_GHOSTS | |
| ghostsize | N_ARRAY_GHOSTS | ||
| gyzi | group type | ARRAY | |
| gzzi | size | NTHETA | |
| size | NPHI | ||
| psii | timelevels | 1 | |
| variable type | REAL | ||
| integrate_tmp_array | compact | 0 | |
| int_tmp | description | Temporary array that is used in the integration of various quantities | |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | N_ARRAY_GHOSTS | ||
| ghostsize | N_ARRAY_GHOSTS | ||
| group type | ARRAY | ||
| size | NTHETA | ||
| size | NPHI | ||
| timelevels | 1 | ||
| variable type | REAL | ||
| eh_area | eh_area | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_area2 | eh_area2 | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_centroid_x | eh_centroid_x | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_centroid_y | eh_centroid_y | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| Group Names | Variable Names | Details | |
| eh_centroid_z | eh_centroid_z | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_centroid2_x | eh_centroid2_x | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_centroid2_y | eh_centroid2_y | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_centroid2_z | eh_centroid2_z | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_circ_eq | eh_circ_eq | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_circ_pol | eh_circ_pol | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| Group Names | Variable Names | Details | |
| eh_circ_eq2 | eh_circ_eq2 | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| eh_circ_pol2 | eh_circ_pol2 | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | MAXIMUM_SURFACE_NUMBER | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| xg | xg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| yg | yg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| zg | zg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dxg | dxg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| Group Names | Variable Names | Details | |
| dyg | dyg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dzg | dzg | compact | 0 |
| dimensions | 1 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| generator_arrays | compact | 0 | |
| alpg | description | Arrays to hold the interpolated metric | |
| description | gauge and level set data | ||
| betaxg | dimensions | 1 | |
| betayg | distribution | DEFAULT | |
| betazg | ghostsize | 0 | |
| gxxg | group type | ARRAY | |
| gxyg | size | NUMBER_OF_GENERATORS | |
| gxzg | timelevels | 1 | |
| gyyg | variable type | REAL | |
| generator_gf | compact | 0 | |
| xgf | description | Temporary grid function used in calculating the right hand side of the generator evolution equation | |
| ygf | dimensions | 3 | |
| zgf | distribution | DEFAULT | |
| group type | GF | ||
| tags | Prolongation=”None” | ||
| timelevels | 1 | ||
| variable type | REAL | ||
| xg2 | xg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| yg2 | yg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| Group Names | Variable Names | Details | |
| zg2 | zg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 3 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dxg2 | dxg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dyg2 | dyg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| dzg2 | dzg2 | compact | 0 |
| dimensions | 2 | ||
| distribution | DEFAULT | ||
| ghostsize | 0 | ||
| ghostsize | 0 | ||
| group type | ARRAY | ||
| size | NUMBER_OF_GENERATORS_THETA | ||
| size | NUMBER_OF_GENERATORS_PHI | ||
| timelevels | 1 | ||
| vararray_size | eh_number_level_sets | ||
| variable type | REAL | ||
| generator_arrays2 | compact | 0 | |
| alpg2 | description | Arrays to hold the interpolated metric | |
| description | gauge and level set data | ||
| betaxg2 | dimensions | 2 | |
| betayg2 | distribution | DEFAULT | |
| betazg2 | ghostsize | 0 | |
| ghostsize | 0 | ||
| gxxg2 | group type | ARRAY | |
| gxyg2 | size | NUMBER_OF_GENERATORS_THETA | |
| size | NUMBER_OF_GENERATORS_PHI | ||
| gxzg2 | timelevels | 1 | |
| gyyg2 | variable type | REAL | |
| generator_gf2 | compact | 0 | |
| xgf2 | description | Temporary grid function used in calculating the right hand side of the generator evolution equation | |
| ygf2 | dimensions | 3 | |
| zgf2 | distribution | DEFAULT | |
| group type | GF | ||
| tags | Prolongation=”None” | ||
| timelevels | 1 | ||
| variable type | REAL | ||
Uses header:
Boundary.h
carpet.h
This section lists all the variables which are assigned storage by thorn EinsteinAnalysis/EHFinder. Storage can either last for the duration of the run (Always means that if this thorn is activated storage will be assigned, Conditional means that if this thorn is activated storage will be assigned for the duration of the run if some condition is met), or can be turned on for the duration of a schedule function.
| Conditional: | |
| f[1] | |
| f[2] | |
| levelset_integers | |
| center_arrays | |
| xg[2] yg[2] zg[2] | |
| dxg dyg dzg | |
| xg2[2] yg2[2] zg2[2] | |
| dxg2 dyg2 dzg2 | |
| sf | |
| ftmp | |
| sftmp | |
| eh_mask | |
| surface_arrays | |
| eh_area2 eh_centroid2_x eh_centroid2_y eh_centroid2_z | |
| eh_circ_eq2 eh_circ_pol2 | |
| find_surface_status | |
CCTK_PARAMCHECK (conditional)
ehfinder_paramcheck
check parameters
| Language: | fortran | |
| Type: | function | |
CCTK_INITIAL (conditional)
ehfinder_read_metric
read in metric from file
| Language: | fortran | |
| Type: | function | |
CCTK_POST_RECOVER_VARIABLES (conditional)
ehfinder_initweights
setup weights for simpson integration
| Language: | fortran | |
| Type: | function | |
CCTK_ANALYSIS (conditional)
ehfinder_level_sets
loop over the level set functions
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | group | |
EHFinder_Level_Sets (conditional)
ehfinder_levelsetloopinit
initialize the loop counter over the level set functions
| Language: | fortran | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Level_Sets (conditional)
ehfinder_surfaces
count the number of surfaces and integrate over them
| Storage: | surface_integers | |
| surface_reals | ||
| surface_index | ||
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | group | |
| While: | ehfinder::more_levelsets | |
EHFinder_Surfaces (conditional)
ehfinder_countsurfacesinit
initialize while loop control
| Language: | fortran | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Surfaces (conditional)
ehfinder_countmarksurfaces
counting and mark surfaces
| After: | ehfinder_countsurfacesinit | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | group | |
| While: | ehfinder::more_surfaces | |
EHFinder_CountMarkSurfaces (conditional)
ehfinder_countsurfaces
check if there are more surfaces
| Language: | fortran | |
| Sync: | surface_index | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_CountMarkSurfaces (conditional)
ehfinder_markpoints
marking surfaces
| After: | ehfinder_countsurfaces | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | group | |
| While: | ehfinder::more_points | |
EHFinder_MarkPoints (conditional)
ehfinder_marksurfaces
mark points inside the current surface
| Language: | fortran | |
| Sync: | surface_index | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_MarkPoints (conditional)
ehfinder_applysymsc
select the surface counter grid function for boundary conditions
| After: | ehfinder_marksurfaces | |
| Language: | fortran | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
CCTK_INITIAL (conditional)
ehfinder_read_lapse
read in lapse from file
| Language: | fortran | |
| Type: | function | |
EHFinder_MarkPoints (conditional)
applybcs
apply boundary conditions (symmetries)
| After: | ehfinder_applysymsc | |
| Type: | group | |
EHFinder_Surfaces (conditional)
ehfinder_infosurfaces
output info about found surfaces
| After: | ehfinder_countmarksurfaces | |
| Language: | fortran | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Surfaces (conditional)
ehfinder_integration
find and integrate over surfaces
| After: | ehfinder_infosurfaces | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | group | |
| While: | ehfinder::integrate_counter | |
EHFinder_Integration (conditional)
ehfinder_findsurface
find surface
| Language: | fortran | |
| Storage: | surface_tmp_arrays | |
| surface_int_array | ||
| Sync: | surface_arrays | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Integration (conditional)
ehfinder_findsurfaceelement
find surface area element
| After: | ehfinder_findsurface | |
| Language: | fortran | |
| Storage: | surface_tmp_arrays | |
| interp_metric_arrays | ||
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Integration (conditional)
ehfinder_integratearea
calculate area integrals
| After: | ehfinder_findsurfaceelement | |
| Language: | fortran | |
| Storage: | integrate_tmp_array | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Integration (conditional)
ehfinder_integratecentroid
calculate centroid integrals
| After: | ehfinder_integratearea | |
| Language: | fortran | |
| Storage: | surface_tmp_arrays | |
| integrate_tmp_array | ||
| Triggers: | eh_centroid_x | |
| eh_centroid_y | ||
| eh_centroid_z | ||
| Type: | function | |
EHFinder_Integration (conditional)
ehfinder_integratecircumference
calculate circumferences
| After: | ehfinder_integratearea | |
| Language: | fortran | |
| Storage: | surface_tmp_arrays | |
| integrate_tmp_array | ||
| Triggers: | eh_circ_eq | |
| eh_circ_pol | ||
| Type: | function | |
EHFinder_Surfaces (conditional)
ehfinder_updatecounter
update the loop variables
| Language: | fortran | |
| Triggers: | eh_area | |
| eh_centroid_x | ||
| eh_centroid_y | ||
| eh_centroid_z | ||
| eh_circ_eq | ||
| eh_circ_pol | ||
| Type: | function | |
CCTK_ANALYSIS (conditional)
ehfinder_copyarea
copy areas to output variable
| After: | ehfinder_level_sets | |
| Language: | fortran | |
| Storage: | eh_area | |
| Triggers: | eh_area | |
| Type: | function | |
CCTK_INITIAL (conditional)
ehfinder_read_shift
read in shift from file
| Language: | fortran | |
| Type: | function | |
CCTK_ANALYSIS (conditional)
ehfinder_copycentroid
copy centroids to output variable
| After: | ehfinder_level_sets | |
| Language: | fortran | |
| Storage: | eh_centroid_x | |
| eh_centroid_y | ||
| eh_centroid_z | ||
| Triggers: | eh_centroid_x | |
| eh_centroid_y | ||
| eh_centroid_z | ||
| Type: | function | |
CCTK_ANALYSIS (conditional)
ehfinder_copycircumference
copy circumferences to output variable
| After: | ehfinder_level_sets | |
| Language: | fortran | |
| Storage: | eh_circ_eq | |
| eh_circ_pol | ||
| Triggers: | eh_circ_eq | |
| eh_circ_pol | ||
| Type: | function | |
CCTK_ANALYSIS (conditional)
ehfinder_isosurfacearea
find isosurfaces and calculate the area
| Triggers: | eh_area | |
| Type: | group | |
EHFinder_IsoSurfaceArea (conditional)
ehfinder_isosurface
find isosurfaces
| Language: | fortran | |
| Storage: | eh_area | |
| Triggers: | eh_area | |
| Type: | function | |
CCTK_PRESTEP (conditional)
ehfinder_read_metric
read in metric from file
| Language: | fortran | |
| Type: | function | |
CCTK_PRESTEP (conditional)
ehfinder_read_lapse
read in lapse from file
| Language: | fortran | |
| Type: | function | |
CCTK_PRESTEP (conditional)
ehfinder_read_shift
read in shift from file
| Language: | fortran | |
| Type: | function | |
CCTK_PRESTEP (conditional)
ehfinder_read_conformal
read in conformal factor from file
| Language: | fortran | |
| Type: | function | |
CCTK_PRESTEP (conditional)
ehfinder_read_mask
read in excision mask from file
| Language: | fortran | |
| Type: | function | |
MoL_Register (conditional)
ehfinder_molregister
register evolution variables
| Language: | fortran | |
| Type: | function | |
CCTK_INITIAL (conditional)
ehfinder_read_conformal
read in conformal factor from file
| Language: | fortran | |
| Type: | function | |
CCTK_BASEGRID (conditional)
ehfinder_setsym
register the symmetries for the level set function
| Language: | fortran | |
| Storage: | sftmp | |
| Type: | function | |
CCTK_POSTINITIAL (conditional)
ehfinder_maskinit
setup the initial mask
| After: | ehfinder_init | |
| Language: | fortran | |
| Type: | function | |
MoL_CalcRHS (conditional)
ehfinder_sources
calculate the source terms
| Language: | fortran | |
| Storage: | dfx | |
| dfy | ||
| dfz | ||
| g3inv | ||
| Type: | function | |
MoL_CalcRHS (conditional)
ehfinder_generator_sources
calculate the source terms for the generator evolution
| Language: | fortran | |
| Storage: | generator_arrays | |
| Type: | function | |
MoL_CalcRHS (conditional)
ehfinder_generator_sources_2d
calculate the source terms for the 2d generator evolution
| Language: | fortran | |
| Storage: | generator_arrays2 | |
| Type: | function | |
MoL_CalcRHS (conditional)
ehfinder_generator_sources2
calculate the source terms2 for the generator evolution
| After: | ehfinder_sources | |
| Language: | fortran | |
| Storage: | generator_arrays | |
| Type: | function | |
MoL_PostStep (conditional)
ehfinder_poststep
schedule group for symmetry boundaries and syncing
| Type: | group | |
EHFinder_PostStep (conditional)
ehfinder_applysymf
select f for boundary conditions
| Language: | fortran | |
| Sync: | f | |
| sftmp | ||
| Type: | function | |
EHFinder_PostStep (conditional)
applybcs
apply boundary conditions (symmetries)
| After: | ehfinder_applysymf | |
| Type: | group | |
CCTK_POSTSTEP (conditional)
ehfinder_reinitialize
re-initialize the level set function
| Storage: | fbak | |
| eh_mask_bak | ||
| re_init_control | ||
| niter_reinit | ||
| Type: | group | |
CCTK_INITIAL (conditional)
ehfinder_read_mask
read in excision mask from file
| After: | maskone | |
| Language: | fortran | |
| Type: | function | |
(conditional)
ehfinder_prereinitialize
routines for re-initialization control
| Type: | group | |
EHFinder_PreReInitialize (conditional)
ehfinder_reinitializecontrol
initializes the re-initialization control
| Language: | fortran | |
| Options: | global | |
| Type: | function | |
EHFinder_PreReInitialize (conditional)
ehfinder_reinitializeinitialize
initializes variables for reinitialization
| After: | ehfinder_reinitializecontrol | |
| Language: | fortran | |
| Type: | function | |
(conditional)
euler_reinitializeevolve
schedule group for euler re-initialization evolution
| Type: | group | |
Euler_ReInitializeEvolve (conditional)
ehfinder_reinitializeeuler
euler scheme
| Language: | fortran | |
| Storage: | dfx | |
| dfy | ||
| dfz | ||
| dfsq | ||
| Type: | function | |
Euler_ReInitializeEvolve (conditional)
ehfinder_applysymfsftmp
select f for boundary conditions
| After: | ehfinder_reinitializeeuler | |
| Language: | fortran | |
| Sync: | f | |
| sftmp | ||
| Type: | function | |
Euler_ReInitializeEvolve (conditional)
applybcs
apply boundary conditions (symmetries)
| After: | ehfinder_applysymf | |
| Type: | group | |
(conditional)
euler_poststep
schedule group for euler re-initialization post step
| Type: | group | |
Euler_PostStep (conditional)
ehfinder_reinitializepoststep
check if the re-initialization is done
| Language: | fortran | |
| Options: | global | |
| Type: | function | |
EHFinder_ReInitialize (conditional)
ehfinder_prereinitialize
pugh version of the pre-re-initialization routines
| Type: | group | |
CCTK_INITIAL (conditional)
ehfinder_init
setup local variables
| Language: | fortran | |
| Sync: | f | |
| Type: | function | |
EHFinder_ReInitialize (conditional)
euler_reinitialize
schedule group for euler re-initialization
| After: | ehfinder_prereinitializepugh | |
| Type: | group | |
| While: | ehfinder::re_init_control | |
Euler_ReInitialize (conditional)
euler_reinitializeevolve
schedule group for euler re-initialization evolution with pugh
| Type: | group | |
Euler_ReInitialize (conditional)
euler_poststep
schedule group for euler re-initialization post step
| After: | euler_reinitializeevolve | |
| Type: | group | |
EHFinder_ReInitialize (conditional)
ehfinder_reinitialize_check
check to see if re-initialization has to be undone
| After: | euler_reinitialize | |
| Language: | fortran | |
| Type: | function | |
EHFinder_ReInitialize (conditional)
ehfinder_prereinitialize_carpet
carpet version of the pre-reinitialization routines
| Language: | c | |
| Options: | level | |
| Type: | function | |
EHFinder_ReInitialize (conditional)
ehfinder_reinitialize_wrapper
wrapper routine for euler re-initialization for carpet
| After: | ehfinder_prereinitialize_carpet | |
| Language: | c | |
| Options: | level | |
| Type: | function | |
| While: | ehfinder::re_init_control | |
EHFinder_ReInitialize (conditional)
rk2_reinitialize
schedule group for rk2 re-initialization
| After: | ehfinder_reinitializecontrol | |
| Type: | group | |
| While: | ehfinder::re_init_control | |
RK2_ReInitialize (conditional)
ehfinder_reinitializerk2_1
rk2 scheme step 1
| Language: | fortran | |
| Storage: | dfx | |
| dfy | ||
| dfz | ||
| dfsq | ||
| Type: | function | |
RK2_ReInitialize (conditional)
ehfinder_applysymf
select f for boundary conditions
| After: | ehfinder_reinitializerk2_1 | |
| Language: | fortran | |
| Sync: | f | |
| Type: | function | |
RK2_ReInitialize (conditional)
applybcs
apply boundary conditions (symmetries)
| After: | sym_rk2_1 | |
| Type: | group | |
CCTK_INITIAL (conditional)
ehfinder_init_f
setup the initial surface
| Language: | fortran | |
| Sync: | f | |
| Type: | function | |
RK2_ReInitialize (conditional)
ehfinder_reinitializerk2_2
rk2 scheme step 2
| After: | sym_rk2_1 | |
| Language: | fortran | |
| Storage: | dfx | |
| dfy | ||
| dfz | ||
| dfsq | ||
| Type: | function | |
RK2_ReInitialize (conditional)
ehfinder_applysymf
select f for boundary conditions
| After: | ehfinder_reinitializerk2_2 | |
| Language: | fortran | |
| Sync: | f | |
| Type: | function | |
RK2_ReInitialize (conditional)
applybcs
apply boundary conditions (symmetries)
| After: | sym_rk2_2 | |
| Type: | group | |
CCTK_POSTSTEP
ehfinder_setmask
set the mask
| After: | ehfinder_reinitialize | |
| Storage: | tm_mask | |
| Type: | group | |
EHFinder_SetMask
ehfinder_setmask1
start modifying the mask
| Language: | fortran | |
| Sync: | f | |
| eh_mask | ||
| tm_mask | ||
| Type: | function | |
EHFinder_SetMask
ehfinder_applysymall
select both f and eh_mask for boundary conditions
| After: | ehfinder_setmask1 | |
| Language: | fortran | |
| Type: | function | |
EHFinder_SetMask
applybcs
apply boundary conditions (symmetries)
| After: | ehfinder_applysymall | |
| Type: | group | |
EHFinder_SetMask
ehfinder_setmask2
find excision boundaries
| After: | ehfinderall_applybcs | |
| Language: | fortran | |
| Sync: | eh_mask | |
| tm_mask | ||
| Type: | function | |
EHFinder_SetMask
ehfinder_applysymmask
select eh_mask for boundary conditions
| After: | ehfinder_setmask2 | |
| Language: | fortran | |
| Type: | function | |
EHFinder_SetMask
applybcs
apply boundary conditions (symmetries)
| After: | asm1 | |
| Type: | group | |
CCTK_INITIAL (conditional)
ehfinder_initweights
setup weights for simpson integration
| Language: | fortran | |
| Type: | function | |
EHFinder_SetMask
ehfinder_setmask3
check to see if the mask needs to be modified
| After: | ehfinder_asm1 | |
| Language: | fortran | |
| Sync: | eh_mask | |
| tm_mask | ||
| Type: | function | |
EHFinder_SetMask
ehfinder_applysymmask
select eh_mask for boundary conditions
| After: | ehfinder_setmask3 | |
| Language: | fortran | |
| Type: | function | |
EHFinder_SetMask
applybcs
apply boundary conditions (symmetries)
| After: | asm2 | |
| Type: | group | |
EHFinder_SetMask
ehfinder_setmask2
find excision boundaries
| After: | asm2 | |
| Language: | fortran | |
| Sync: | eh_mask | |
| tm_mask | ||
| Type: | function | |
EHFinder_SetMask
ehfinder_applysymmask
select eh_mask for boundary conditions
| After: | sm2 | |
| Language: | fortran | |
| Type: | function | |
EHFinder_SetMask
applybcs
apply boundary conditions (symmetries)
| After: | asm3 | |
| Type: | group | |
CCTK_POST_RECOVER_VARIABLES (conditional)
ehfinder_init
setup local variables
| Language: | fortran | |
| Sync: | f | |
| Type: | function | |
| Alias Name: | Function Name: |
| ApplyBCs | EHFinderMask3_ApplyBCs |
| EHFinder_ApplySymF | Sym_RK2_2 |
| EHFinder_ApplySymMask | ASM3 |
| EHFinder_PreReInitialize | EHFinder_PreReInitializePugh |
| EHFinder_SetMask2 | SM2 |
| Euler_PostStep | Euler_PostStepPUGH |
| Euler_ReInitializeEvolve | Euler_ReInitializeEvolvePUGH |