Carpet
Erik Schnetter <schnetter@uni-tuebingen.de>
July 21, 2003
Abstract
This text describes the Carpet arrangement. Carpet is a mesh refinement driver for Cactus that can
replace PUGH, the standard unigrid driver. Carpet supports multiple refinement levels and multiple
grid patches. Carpet can run in parallel, but not yet very efficiently so. Carpet does not yet support
multiple grid hierarchies, i.e. shadow hierarchies or automatic convergence tests.
1 Overview
1.1 Fixed Mesh Refinement, aka Box-in-Box
Fixed Mesh Refinement (FMR), also known as box-in-box, is a way to increase the local resolution in unigrid
applications, while retaining the basic unigrid character of an application. A small number (maybe two or three)
of grids with varying resolution overlay each other, where the coarsest grid has the largest extent. This allows
the application to benefit from the higher resolution of the smaller grids while keeping the outer boundary far
out at the same time. The main advantage of FMR are that it needs far less resources than globally increasing
the resolution.
1.2 Carpet
Carpet is the name of an FMR driver, i.e. the back end that handles storage allocation for the grid functions,
parallelism, I/O, and the various inter-grid operations. Carpet was developed in early summer of 2000 by Erik
Schnetter [Sch], then a research scholar in the Department for Astronomy and Astrophysics [AA] of Penn State
University [Pen]. In spring 2001, Carpet was coupled to Cactus as a drop-in enhancement for the standard
unigrid Cactus driver PUGH.
1.3 Cactus
From the main Cactus web pages [Cac]:
Cactus is an open source problem solving environment designed for scientests and engineers.
Its modular structure easily enables parallel computation across different architectures and
collaborative code development between different groups. Cactus originated in the academic
research community, where it was developed and used over many years by a large international
collaboration of physicists and computational scientists.
2 Introduction
2.1 Fixed Mesh Refinement
A standard way of solving partial differential equations are finite differences on a regular grid. This is
also called unigrid. Such an application discretises its problem space onto a single, rectangular
grid which has everywhere the same grid spacing. This grid might be broken up into several parts
for parallelisation purposes, but parallelisation should be transparent to the physics part of the
application.
Increasing the resolution in a unigrid application is somewhat expensive. For example, increasing the resolution
by a factor of two requires a factor of eight more storage in three dimensions. Given a constant Courant factor,
the calculation time will even go up by a factor of sixteen. This behaviour makes it easy to find problems that
cannot be solved on contemporary supercomputers, no matter how big and fast those computers
are.
Apart from physical insight, which often has to be used to decrease the problem size until it fits the current
hardware, there are also numerical and algorithmic methods to decrease the resource requirements of the
application. Most applications need the high resolution only in a part of the simulation domain. Discretisation
methods that don’t require a uniform resolution, such as finite elements, can implement non-uniform resolutions
very naturally. One problem with finite elements is that many physicists today are not familiar with finite
elements, or shy away from their perceived complexity, or are not willing to adapt existing finite difference
code.
Fixed Mesh Refinement (FMR) is a poor man’s way of implementing a non-uniform resolution
into a unigrid application with minimal changes to its structure. Instead of only one grid, there
are several grids or grid patches with different resolutions. The coarsest grid usually encloses the
whole simulation domain. Successively finer grids overlay the coarse grid at those locations where a
higher resolutions is needed. The coarser grids provide boundary conditions to the finer grid through
interpolation.
Instead of updating only one grid, the application has to update all grids. The usual approach is to
first take a step on the coarsest grid, and then recursively take several smaller steps on the finer
grids. The Courant criterion requires that the step sizes on the finer grids be smaller than on the
coarse grid. The boundary values for the finer grids are found through interpolation in space and
time from the coarser grid. In the end, the information on the finer grids is injected into the coarse
grids.
Strictly speaking there is no need for a coarse grid on the regions covered by the finer grids. But as stated above,
the resources required for treating the overlapping region on the coarse grid are only minimal compared to
treating the finer grids. And because a coarse grid with a hole often creates complications, this obvious
optimisation is often left out.
2.2 Carpet
Carpet is a C++ library that provides infrastructure to describe regions of varying resolution in a convenient
and efficient way. Carpet contains routines to manage grid hierarchies, containing the relationships between the
components of the grid on the different refinement and convergence levels. Carpet has a notion
of simulation time and grid spacing, which are necessary for interpolation, and contains efficient
interpolators.
Carpet can run on several processors in parallel using MPI for communication. Each grid can be broken
down into several components, and every component has a home processor. Carpet also contains
operators to move certain regions to a different processor, or to synchronise all components of a
grid.
Carpet is also an arrangement of thorns for Cactus, implementing a driver and associated I/O routines for
both ASCII and binary I/O. It should be possible to substitute Carpet for the standard Cactus
driver PUGH without changes to the application thorns and thus use Carpet as a unigrid driver.
Making use of the FMR capabilities of Carpet usually requires some rearranging of the application,
comparable in general to the changes necessary for a uniprocessor application to run on multiple
processors.
The driver section of Carpet contains the logic to manage storage for the grid functions, to traverse the grid
hierarchy for all scheduled routines, and to automatically apply the necessary inter-grid operators for
prolongation (interpolation of the fine grid boundaries) and restriction (injecting the fine grid information back
into the coarse grid).
The ASCII I/O routines use the quasi-standard gnuplot [gnu] format. The binary I/O routines use the FlexIO
library [Sha] written by John Shalf. It allows efficient and platform independent I/O. The FlexIO format is based
on HDF [HDF] and also supported by several visualisation packages.
Carpet is copyrighted by Erik Schnetter, and is available under the GPL licence from a CVS [CVS]
repository.
2.3 WaveToy
Cactus comes with a sample application called WaveToy, which solves the scalar wave equation with various
initial data and boundary conditions. An an example, I have extended WaveToy so that is uses Carpet’s FMR
capabilities. WaveToy serves both as a test case for Carpet, and as example of how to convert an application to
using FMR.
The equation solved by WaveToy is the well known scalar wave equation, discretised using the Leapfrog method
with three time levels, yielding second order accuracy in space and time. A typical set of initial data are a plane
wave, and a typical boundary condition is periodicity. Those allow long term simulations as well as easy and
meaningful comparisons to the analytic solution.
3 Compiling Cactus With Carpet
Carpet has been written in C++, using templates and the STL (Standard Template Library). Both templates
and the STL make writing and debugging code a lot easier. Without templates, I would have had to put much
effort into making Carpet support all of Cactus’ data types. Without the STL, I would have had to spend quite
some time implementing basic containers such as lists or sets. I still had to implement a custom vector type,
because STL’s vector type is optimised for large vectors only, and I needed threedimensional vectors of
integers.
The inner loops of Carpet are the inter-grid operators, that is the routines that copy, restrict, and prolongate
between grids. Due to Cactus it was rather easy to write these in Fortran 77, which makes them both fast and
portable.
Carpet is an arrangement in Cactus. It can theoretically be compiled without any external library, if you
omit the binary I/O support which requires the FlexIO library. FlexIO is already part of Cactus in
the thorn CactusExternal/FlexIO. I suggest that you enable support for the HDF format in the
FlexIO library, although this is not necessary. For that, you have to install the HDF5 libraries
first.
3.1 Hurdle 1: STL
Some operating systems do not have a compliant STL (Standard Template Library) installed. If not, then you
are in trouble. Carpet does make use of the STL, and there is no way around that.
3.2 Hurdle 2: Templates
Some compilers contain switches to instantiate some or all templates automatically. This usually does not work
when files are put into libraries, which is what Cactus does. The scheme that I found working on all machines is
to instantiate most templates by hand, and have the compiler instantiate the missing templates for every object
file. This is the default for gcc. On SGIs, you have to pass the options -no_auto_include -ptused to the C++
compiler.
The C++ standard specifies a limit when using templates as template parameters. Carpet’s use of the GNU STL
exceeds this limit. Gcc requires the option -ftemplate-depth-30 to enable this.
3.3 WaveToy
Unfortunately, PUGH and Carpet cannot yet be both compiled into a single application. (This will be fixed
soon.) That means that you will have separate executables for unigrid and for mesh refinement
applications.
Configuring Carpet is not quite trivial, because Cactus provides currently no way to autodetect the settings for
Carpet. Hence you will have to set the settings manually. I propose that you start with on of the
pre-made options files in the directory Carpet/Carpet/options. Try e.g. carpet-harpo-sgi for an
SGI, or carpet-lilypond for Linux with gcc, or carpet-lilypond-ic for Linux with the Intel
compilers. Once you have a working options file for your machine, send it to me, so that I can include
it.
As for the thorn list: Carpet has its own ASCII output thorn, which outputs more information than
CactusBase/IOASCII. The thorn list that I use is
CactusBase/Boundary # boundary (grid) [ ] { }
CactusBase/CartGrid3D # grid ( ) [ ] {driver}
#CactusBase/IOASCII # IOASCII (IO,Hyperslab) [ ] {IO}
CactusBase/IOBasic # IOBasic (IO) [ ] {IO}
CactusBase/IOUtil # IO ( ) [ ] { }
CactusBase/LocalInterp # LocalInterp ( ) [ ] { }
CactusBase/Time # time ( ) [ ] { }
CactusConnect/HTTPD # HTTPD (Socket) [ ] {Cactus}
CactusConnect/HTTPDExtra # http_utils (httpd,IO) [ ] { }
CactusConnect/Socket # Socket ( ) [ ] { }
CactusExternal/FlexIO # FlexIO ( ) [ ] { }
CactusExternal/jpeg6b # jpeg6b ( ) [ ] { }
CactusIO/IOJpeg # IOJpeg (IO,Hyperslab,jpeg6b) [ ] {IO}
CactusUtils/NaNChecker # NaNChecker ( ) [ ] { }
CactusWave/IDScalarWave # idscalarwave (wavetoy,grid) [ ] {grid}
CactusWave/IDScalarWaveC # idscalarwave (wavetoy,grid) [ ] {grid}
CactusWave/IDScalarWaveCXX # idscalarwave (wavetoy,grid) [ ] {grid}
#CactusWave/IDScalarWaveElliptic # idscalarwaveelliptic (grid,wavetoy,ellbase) [ ] {idscalarwave}
CactusWave/WaveBinarySource # binarysource (wavetoy,grid,idscalarwave) [ ] { }
CactusWave/WaveToyC # wavetoy (Grid,Boundary) [ ] { }
CactusWave/WaveToyCXX # wavetoy (Grid,Boundary) [ ] { }
CactusWave/WaveToyF77 # wavetoy (Grid,Boundary) [ ] { }
#CactusWave/WaveToyF90 # wavetoy (Grid,Boundary) [ ] { }
#CactusWave/WaveToyFreeF90 # wavetoy (Grid,Boundary) [ ] { }
Carpet/Carpet # driver (CarpetLib) [ ] {Cactus,IO}
Carpet/CarpetIOASCII # IOASCII (CarpetLib,driver,Hyperslab) [ ] {IO}
Carpet/CarpetIOFlexIO # IOFlexIO (CarpetLib,driver,Hyperslab,FlexIO) [ ] {IO}
#Carpet/CarpetIOHDF5 # IOHDF5 (CarpetLib,driver,Hyperslab) [ ] {IO}
#Carpet/CarpetIOSer # IOSer (CarpetLib,driver,Hyperslab) [ ] {IO}
Carpet/CarpetLib # CarpetLib ( ) [ ] { }
Carpet/CarpetReduce # reduce (CarpetLib,driver) [ ] { }
Carpet/CarpetRegrid # CarpetRegrid (CarpetLib,driver) [ ] { }
Carpet/CarpetSlab # Hyperslab (CarpetLib,driver) [ ] { }
The thorns prefixed with # are disabled. IOASCII conflicts with CarpetIOASCII. I disabled IDScalarWaveElliptic
because there is no elliptic solver for mesh refinement, and I disabled WaveToyF90 and WaveToyFreeF90
because gcc does not yet contain a Fortran 90 compiler. CarpetIOHDF5 is not yet finished, and CarpetIOSer
needs the Ser library which is not publically available.
The CactusConnect, CactusIO, and CactusUtils thorns are not necessary, but are nice to have around. You can
safely omit these.
4 Running The Example Applications
Although Carpet works fine with the standard WaveToy thorns, all the example parameter files in the
CactusWave arrangement use PUGH, and can therefore not be directly used.
The coordinate thorn CactusBase/CartGrid3D does not provide periodic boundary conditions. These are
normally provided by the driver PUGH. However, Carpet does not contain any boundary conditions. If you want
to apply periodic boundaries, you will therefore have to use the AlphaThorns/Cart3d coordinate thorn
instead, which does provide periodicity. Unfortunately, AlphaThorns/Cart3d is incompatible with
CactusBase/CartGrid3D. There is a version of WaveToy in the Carpet arrangement that has been adapted to
AlphaThorns/Cart3d. I suggest that you use this version of WaveToy instead of CactusWave to run test
problems, because periodicity makes for nice testing setups.
You can find quite a few example parameter files in the directory Carpet/WaveToyF77/par. I especially
recommend the wavetoyf77_periodic_* set, which comes in two sizes (coarse and fine, corresponding to a
small and a large simulation domain) and three different refinement hierarchies (with one, two, and three level
altogether, respectively). This set thus forms a convergence test, which you can run and test yourself. The set
wavetoyf77_rad_full_* uses radiative instead of periodic boundaries and should also be nice to look at. The
file wavetoyf77_rad_automatic.par is an attempt at adaptive mesh refinement, which may or may not work,
depending on the current status of Carpet.
Second order convergence requires second order interpolation in time, which requires that at least three time
levels are present.
5 Fold Your Own FMR Application
There are three steps to take from a simple unigrid uniprocessor toy application to a full-blown FMR
multiprocessor production application. Those steps are almost independent, and I would like to explain them
and their implications in some detail below.
5.1 Multiple Processors
The probably best known of these is the step from using one to using several processors, also known as
parallelisation. Because many people are already familiar with this step, I will describe it first.
In a uniprocessor application, it is possible to access every grid point in arbitrary manners. In order to allow
multiple processors to run efficiently in parallel, the grid is broken down into several rectangular components,
and each processor is assigned one of these components.
The components will usually overlap by a few grid points, so as to allow the processors to e.g. calculate spatial
derivatives (which require neighbouring grid points) without having to communicate for every grid point. From
time to time it is then necessary to synchronise the overlapping region, which is the only time at
which communication happens. This allows the application to run almost unchanged, i.e. without
invoking communication itself. The synchronisation routine is provided by the driver and not by the
application.
Of course a serial applicate usually will have to be changed to support multiple processors. In order to do so, all
the operations that the application performs have to be classified into one of two categories:
One category contains the so-called local operations. These are operations that are applied to each and every
grid point individually, and that do not depend on any other grid point except nearby neighbours. Each local
operation will thus involve a loop over all grid points, and in order to run on multiple processors, after each such
loop the synchronisation routine has to be called. An example of a local operation would be calculating a spatial
derivative.
The other category contains so-called global operations. These operations do not depend on individual grid
points, and thus do not involve loops over grid points. The result of a global operation is the same on all
processors; therefore global operations don’t involve communication and don’t require synchronisation. An
example of a global operation would be to check how many time steps have been taken, and decide whether the
simulation should be terminated.
Typically most operations can be classified or rewritten to be either local or global. But often there are
operations that fit neither category, and these parts of an application are hardest to parallelise. Applying the
boundary conditions, to give another example, might seem at first to be neither local nor global.
But in a slight (yet completely correct) stretch of the term ”applied to all grid points”, boundary
conditions can be classified as local; they are a local operation that just does nothing to most grid
points.
To give one more example, calculating an error norm does not fit these categories. It is neither local nor global.
It is not local because the results involved all grid points (and not only nearby neighbours), and it is not global
because it does involve the grid points. All operations that do not fit the two category require typically special
handling, and often require hand-coded communication in the application. Luckily calculating various norms
is such a common case that there are special routines for that already present, called reduction
operators.
5.2 Multiple Resolution Levels
There are several reasons why an application might want to incorporate more than one grid, overlapping and
each with a different resolution.
The most commonly known reason is probably a convergence test, where the very same problem is treated in
different resolutions. Differences in the result are then likely caused by insufficient resolution on the coarser (or
on all) grids. For a convergence test, the grids are completely independent, and it does not matter whether the
simulation runs on all grids simultaneously or sequentially. In order to treat the grid sequentially, the application
does not have to be changed at all.
The reason of interest here is of course FMR. For FMR, the order in which the grids are treated is fixed. As
described above, there is first a time step on the coarse grid, and then recursively several smaller
steps on the finer grids. This order does require certain changes in the application. The sequence of
operations that form a single time step have to be identified and isolated. (Which is to say that
there has to be a routine that calculates a time step, that is, a complete time step, and nothing
else.) It is then the task of the FMR driver to call this routine for the correct grids in the correct
order.
Other reasons for multiple resolution levels are e.g. multigrid algorithms for elliptic equations,
which I do not want to mention here, or shadow hierarchies to determine truncation errors, which I
also want to skip here. Shadow hierarchies are very similar to the convergence levels described
above.
Apart from this order in which the operations are performed on the grids, there is one more complication for
FMR. The boundary values of the finer grids have to be calculated from the coarser grids through interpolation.
An because the time steps on the finer grids are smaller, there is not always a corresponding value on the coarser
grids available. This makes it necessary to interpolate in time between time steps on the coarser
grids. The alternative would be to take smaller steps on the coarser grids, and this would be very
expensive.
These interpolations in time make it necessary that the driver knows which grid function contains
values corresponding to what time. The usual way to achieve this is to have several time levels per
grid function; three time levels allow for a second order interpolation in time. Only grid functions
with enough time levels can be interpolated, i.e. boundary conditions can be calculated only for
those.
Fortunately time levels are rather widespread in applications, so they are no new concept to introduce.
Unfortunately they are often abused, so that values corresponding to the wrong time are stored in a time level,
usually with the excuse of saving storage. This will in general not work with FMR, because the
driver then cannot interpolate in time, leading to incorrect values on the boundaries of the finer
grids.
5.3 Multiple Grid Components
Sometimes it is convenient to have a simulation domain that is not a rectangle. It might instead be an L-shaped
simulation domain, or a domain that consists of two disconnected rectangular regions. This issue becomes more
important with FMR, because there it is often convenient to have several disconnected refined regions. As long
as there are enough processors available, each processor can be assigned a region or a part thereof, and no new
concept need be introduced. If, however, there are fewer processors than regions, then a new problem
arises.
A common case for that problem might be a simulation containing just two refined regions, and running on a
single processor. The refined grid the consists of two component. The problem then is that the two components
cannot be treated sequentially: Imagine the time evolution routine working on (say) the first component. It will
at some time call the synchronisation routine. At that time there are no values from the second component
available, because the second component has not been treated yet. Therefore the synchronisation routine cannot
complete. That means in turn that the time evolution routine cannot complete working on the first component,
leading to a deadlock. Work on neither component can be completed before work on the other
component.
The solution is to break up the time evolution routine into several smaller routines, each consisting of a single
either local or global operation. (“Local” and “global” have here the exact same meanings that were defined
above for parallelisation.) A local operation works, by definition, on individual grid points. Hence the local
routines have to be called once for every grid component. A global operation, by definition, does
not depend on individual grid points. Hence it has to be called only once per processor, and not
once per component. That means that the driver has to be told the category individual routine is
in.
5.4 Example
Let me finish this section with an detailed example. Suppose you want to solve the equation
\begin {eqnarray} \frac {d}{dt} u & = & f(u) \quad , \end {eqnarray}
integrating using the midpoint rule, i.e. the simplemost second-order time integration scheme. Given values at
the previous time \(u^{n-1}\), one first calculates a first order solution using an Euler step, leading to the intermediate
result
\begin {eqnarray} v^n & = & u^{n-1} + dt\; f(u^{n-1}) \quad . \end {eqnarray}
The second and final step is then calculated via
\begin {eqnarray} u^n & = & u^{n-1} + dt\; f(\frac {1}{2} [u^{n-1} + v^n]) \quad . \end {eqnarray}
The corresponding pseudo code would look like
-
Calculate Euler step, storing the result into \(u^n\)
-
Apply boundary conditions to \(u^n\)
-
Synchronise \(u^n\)
-
Calculate average of \(u^{n-1}\) and \(u^n\), storing the result into \(v^n\)
-
Calculate second step, storing the result again into \(u^n\)
-
Apply boundary conditions again to \(u^n\)
-
Synchronise again \(u^n\)
The above algorithm looks a bit different from a naive implementation of the midpoint rule. One difference is
that both the first and the second step store their result into \(u^n\). This is necessary because it would be inconvenient
to apply boundary conditions to the intermediate value \(v^n\). Remember, in order to apply boundary
conditions on the finer grids, there have to be several time levels present. With the above scheme,
only \(u\) needs several time levels. \(v\) is used only as a temporary (and could conceivably be completely
eliminated).
Note also that the first step goes all the way from time level \(n-1\) to time level \(n\). The midpoint rule can be rewritten
(in fact, is usually written) so that the first step is only a half step, leading to the time level \(n - \frac {1}{2}\). This is not possible
for FMR, because interpolating to the time \(n - \frac {1}{2}\) is not possible, and thus there could be no boundary conditions
applied after the first step.
The second thing to note is that the application of the boundary condition and the synchronisation have been
separated rather artificially. Normally synchronisation would be considered part of the boundary condition. In
this case, however, the applying the boundary condition is a local operation, whereas synchronisation counts as
global operation. (It is not obvious that synchronisation should be global, but as the synchronisation routine is a
part of Carpet, it was up to me to decide this.) As explained above, local and global operations have to be
separated.
Separating the evolution steps and the boundary condition routines is, on the other hand, just a notational
convenience. There could well be a single routine implementing both.
For Cactus, the order in which to call the individual parts of the time evolution routines is described in the
schedule routines, i.e. in the files called schedule.ccl. By default a routine is assumed to be local; global
routines have to be tagged with OPTIONS: GLOBAL.
The tag SYNC: groupname indicates that the group groupname should be synchronised after the
scheduled routine has been called for all grid components. This obviously makes sense only for local
routines. Using the SYNC: tag is preferred over calling the synchronisation routine CCTK_SyncGroup
directly.
The example thorn WaveToy in Carpet’s arrangement is a bit simpler than what is described here, because it
uses the Leapfrog scheme which consists of only a single step. I would suggest looking at WaveToy as an initial
FMR example.
The thorn SpaceToy is implemented very close to the way described here. It evolves two variables phi and psi,
but it is also coupled to the thorn HydroToy. This coupling introduces some additional complications. The thorn
HydroToy, on the other hand uses a predictor-corrector scheme, which is also a two step scheme and thus more
complex that WaveToy. All the coupling between SpaceToy and HydroToy is contained in SpaceToy. I would
thus suggest looking at HydroToy first.
I assume that converting an application to FMR is straightforward after handling the time levels has been
straightened out.
6 Other Features in Carpet
6.1 Carpet Timers
The text is this section was extracted from email threads on the Carpet developers mailing list from 2006-August
and 2006-September.
Special timers have been added to both Carpet and CarpetLib so that it would be easier to attribute time spent
to different parts of a simulation. These timers do not work as standard Cactus timers. Here is how to use their
timing mechanisms:
When measuring the performance of a simulation, one has to work on two levels. On the higher level, one needs
to attribute time spent to different routines in different thorns. In addition to the existing Cactus timers, which
measure the time for each scheduled routine, there are now timers in Carpet, measuring the following
times:
-
Evolve total time in evolution
-
Evolve::do_terminate determine whether to terminate
-
Evolve::AdvanceTime cycle time levels
-
Evolve::PreRegrid determine new grid structure
-
Evolve::Regrid change grid structure
-
Evolve::PostRegrid re-initialise after grid structure changes
-
Evolve::EvolutionI the ”physics” time stepping
-
Evolve::Restrict copying fine grid values to coarser grids
-
Evolve::EvolutionII analysis and I/O
We suggest to active the thorn AlphaThorns/MPIClock. This is a timer based on MPI’s Wtime function,
measuring wall time, but also measuring how ofter the timer was started, and keeping track of the average time
and the standard deviation. We also suggest to use CactusUtils/TimerReport to output these timers every few
coarse grid time steps.
Use Carpet::output_timers_every to activate these timers.
These timers should be understandable to every Cactus user who has written a thorn. You can use them to find
out what part of your simulation you need to optimise. Keep in mind that Cactus’s cumulative timing numbers
for complete scheduling bins are wrong (there is double-counting if routines are scheduled multiple times), only
the times for individual routines are correct.
On a lower level, and when running on many processors, one needs to find out which processor spends how much
time in what stage of communication. We introduced special, non-Cactus timers for that. These timers measure
the wall clock time,its average, its standard deviation, and the number of time measurements. They also measure
how many bytes were transferred in total, how many communications there were, and the average and standard
deviation.
Use CarpetLib::print_timestats_every to activate these timers.
Note that understanding these timers probably requires some in-depth knowledge of Carpet’s communication
mechanism.
In order to measure the performance of a mesh refinement simulation on multiple processors, I suggest to use
parameters such as the following:
# Activate standard Cactus timer output
Cactus::cctk_timer_output = full
# Activate an additional clock based on MPI
# (important for runs on multiple processors)
ActiveThorns = "MPIClock" # This thorn is in AlphaThorns
# Produce timing information in regular intervals
# (important since runs may abort early)
ActiveThorns = "TimerReport" # This thorn is in CactusUtils
TimerReport::out_every = 1024
# Activate Carpet timers
# (using additional timers for mesh refinement related activities)
Carpet::output_timers_every = 1024
# Activate CarpetLib timers
# (measuring inter-processor communication)
CarpetLib::print_timestats_every = 1024
CarpetLib::print_memstats_every = 1024
You should replace the number 1024 with a number of iterations that corresponds to several coarse grid time
steps; timing output every ten minutes or so would be reasonable.
Currently all timer output goes to stdout. That will be improved soon.
7 Further documentation
The individual thorns in the Carpet arrangement might contain further documentation, which is also available in
the thorn guide. Additionally, there is a document internals.tex in the arrangement’s doc directory, and a
document threelev_initdata.tex in thorn Carpet’s doc directory.
8 Frequently Asked Questions
Here are a few of the more frequently asked questions with some answers.
-
If I run without any refined grids, why don’t I get the same results as with PUGH?
There are two possible reasons. The most common is that the you are not comparing exactly the
same output. It used to be the case that norms would disagree (this is no longer the case). If
it is the ASCII output that disagrees, then you should note that the default output format for
CarpetIOASCII gives more digits than CactusBase/IOASCII. If you want to get “identical” results
for this output, try setting IOASCII::out_format = ".14f").
The second reason is subtle differences are bugs in the implementation. Good luck finding these...
-
I switch on a refined grid. Why do I not see it output? Why is the output strange?
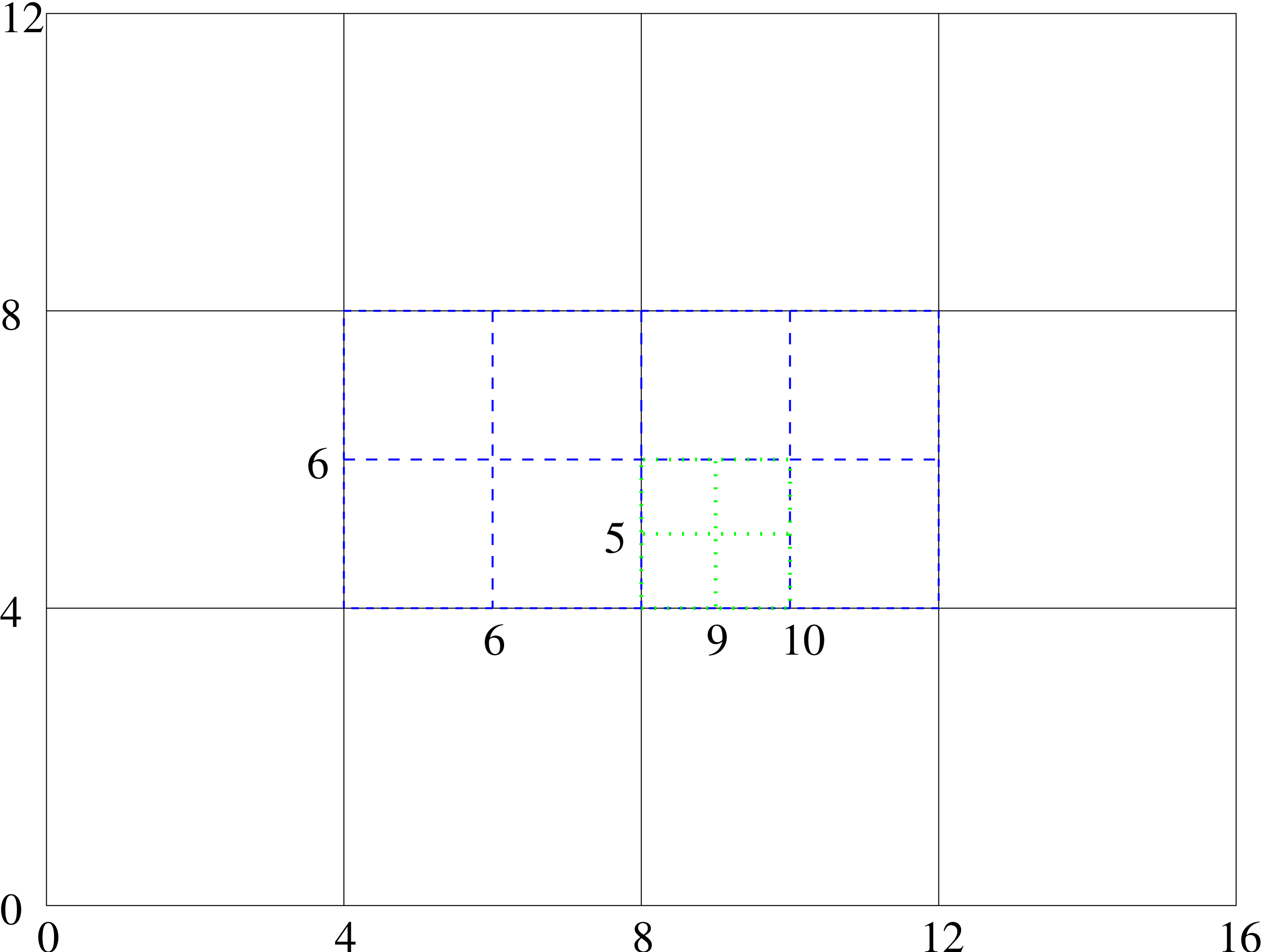
As soon as you switch on refinement the way the grids are numbered by index changes. The numbering is
done with respect to the finest grid but covers the entire domain. An example of how the numbering works
is given in figure 1. It is important to note that this also applies to the numbering in time. So with the
grid structure of figure 1 output for the coarsest grid only occurs on iterations \(0,4,8,\dots \), for the medium grid only
on iterations \(0,2,4,\dots \), and for the finest grid on iterations \(0,1,2,\dots \). Note that here the finest grid is not the finest existing
grid, but the finest possible grid. This is controlled by the Carpet::max_refinement_levels
parameter.
So, there are plenty of reasons why the output might be strange:
-
You are requesting output on iterations when not all grids are output. For example, requesting
output every \(5^{\text {}th}\) iteration with the above grid structure would only output the coarse grid every
20 iterations.
-
You are requesting output along an index that does not intersect with any grid points. For
example, the line defined by \(j = 6\) in the example above corresponds to the center of the box, but
does not intersect the coarse grid at all!
-
Requesting output along a line defined by a coordinate value will give you the index closest to
it. This may not agree on the different refinement levels. In the example above the coordinate
value \(y=5.1\) is closest to \(j=5\) on the fine grid, \(j=6\) on the medium grid, and \(j=4\) on the coarse grid. All the
different lines will be output but you should not expect points that appear to overlap in the
output to agree as they’re actually not at the same point.
-
CarpetRegrid (which sets up the refined boxes) knows nothing about symmetries. So if you have a
simulation in, for example, octant mode with \(x,y,z\in [0,10]\) and you leave all the parameters to be the defaults, the
following will happen:
-
CarpetRegrid creates a refined box at the center of the index space. This might cover
something like \(x,y,z\in [3,7]\).
-
When the IO thorn requests the output lines and planes it does know the symmetries, so
tries to put the lines and planes as close to the origin \(x=y=z=0\) as possible.
-
When output occurs the lines and planes don’t intersect the fine grid and so you get no
output.
Morals: Comparing 1D output on different refinement levels can be very frustrating. 2D output is usually
much more informative. Using symmetry conditions with Carpet is tricky.
-
I want to run with periodic boundaries. Why aren’t things working correctly?
You thought symmetry boundaries were bad? Periodic boundaries are even worse.
Firstly, Carpet does not itself implement periodic boundaries. The thorn TAT/Periodic is “more or
less” driver independent and does. This should be used to implement the actual boundary
conditions. You should not need to change your code – just activate the thorn with the appropriate
parameters.
Secondly, periodic boundaries do not work the same way as symmetry boundaries. This is because you
cannot specify a point in coordinate space where the boundary actually lies; it really lies in the index
space. The following example will hopefully help.
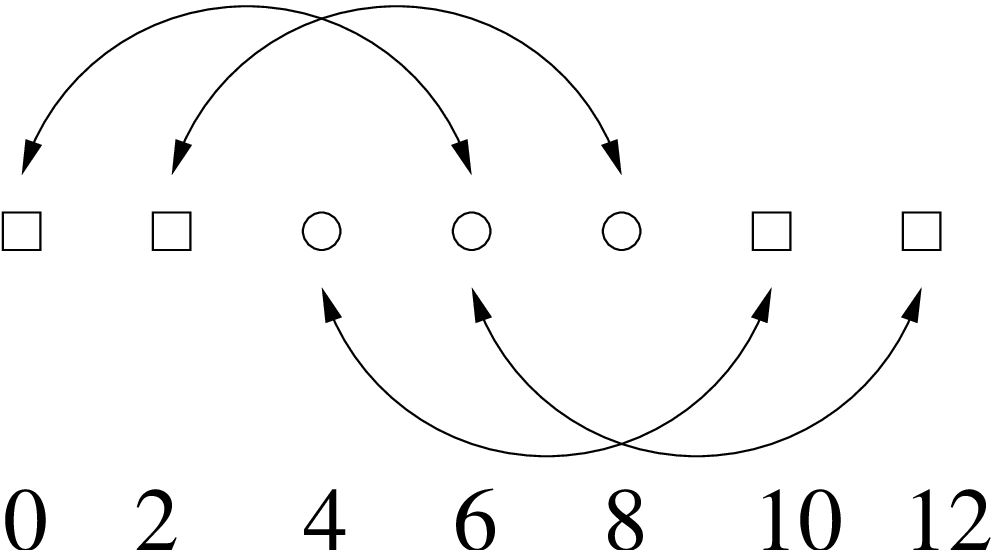
Take a 1D slice through the grid. There are 7 points with 2 boundary (ghost) zones (0,2 and 10,12), so only
3 points are actually being evolved (4, 6, 8). Periodic boundaries means that the boundary points are
identified with certain evolved points. For example, point 2 is to the left of the first evolved point and so
must be identified with the last evolved point (8). The identifications are shown in figure 2.
We then want to place a refined region across the entire width of the domain but also have the
correct periodic boundaries. The crucial point is to ensure that points that are identified on the
coarse grid are identified in the same way on the fine grid. For example, point 2 must still
be identified with point 8. Therefore point 2 must remain a boundary point and point 8 an
interior point. Point 4 must also be identified with point 10. There are therefore 2 possibilities:
-
Point 3 is the first interior point on the refined grid and point 8 the last. Therefore the point
to the “left” of point 3, point 2, is still identified with point 8.
-
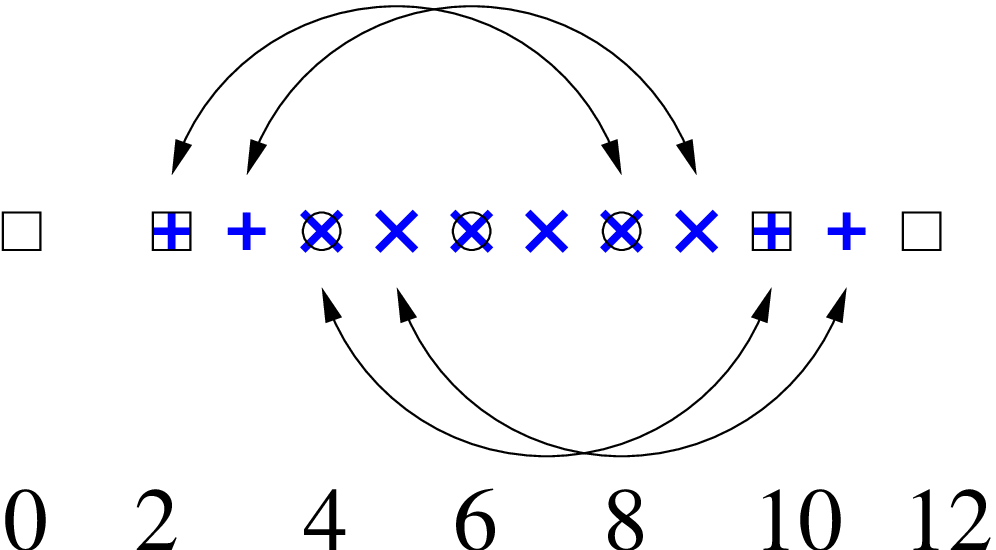
Point 4 is the first interior point on the refined grid and point 9 the last. This possibility is
illustrated in figure 3.
So to specify the particular refined grid shown in figure 3 you would specify a lower bound of 2, an upper
bound of 11, and that both boundaries are outer boundaries. An example for a \(44 \times 7 \times 7\) grid where the “centre
half” of the grid in the \(x\) direction is refined and the refined region covers the entirety of the \(y\) and \(z\)
directions, you could use
carpet::max_refinement_levels = 2
carpetregrid::refinement_levels = 2
carpetregrid::refined_regions = "manual-gridpoint-list"
carpetregrid::gridpoints = "[ [ ([22,2,2]:[62,11,11]:[1,1,1]) ] ]"
carpetregrid::outerbounds = "[ [ [[0,0],[1,1],[1,1]] ] ]"
References
[AA] Department for Astronomy and Astrophysics, http://www.astro.psu.edu/.
[Cac] Cactus web pages, http://www.cactuscode.org/.
[CVS] CVS, http://www.cvshome.org/.
[gnu] gnuplot, http://www.gnuplot.info/.
[HDF] HDF, http://hdf.ncsa.uiuc.edu/.
[Pen] Penn State University, http://www.psu.edu/.
[Sch] Erik Schnetter, <schnetter@uni-tuebingen.de>.
[Sha] John Shalf, FlexIO library: http://zeus.ncsa.uiuc.edu/~jshalf/FlexIO/.
[TAT] Theoretische Astrophysik Tübingen, http://www.tat.physik.uni-tuebingen.de/.